где ктг – крутизна характеристики тахогенератора;
кд.н. – коэффициент передачи делителя напряжения.
Выбирая определенный тип датчика тока (например на основе шунта или трансформатора тока) аналогично рассчитываем кот, а затем по (6.134) рассчитываем коэффициент усиления регулятора скорости крс.
6.10. Расчет механических характеристик асинхронного электропривода по системе "регулятор напряжения – двигатель"
Линеаризованные механические характеристики в замкнутой системе описываются уравнением (6.133). Модуль жесткости механической характеристики в замкнутой системе определяются по формуле
 , (6.142)
, (6.142)
где
 ; (6.143)
; (6.143)
 ; (6.144)
; (6.144)
 , (6.145)
, (6.145)
U(1) – действующее значение первой гармоники выходного напряжения регулятора напряжения;
Uу – напряжение управления;
Uвх.рс – входное напряжение регулятора скорости;
Uф.ном – действующее значение номинального фазного напряжения АД.
Расчет параметров системы электропривода начинают с того, что задаются желаемой величиной модуля жесткости βз.с. механических характеристик замкнутой системы и выбирают тахогенератор для осуществления обратной связи по скорости, что позволяет рассчитать кос. Если известны параметры системы управления, можно определить коэффициент усиления по напряжению регулятора напряжения
 , (6.146)
, (6.146)
а затем из (6.142) – величину коэффициента усиления крс регулятора скорости.
Для уменьшения завышения габаритной мощности двигателя в системе РН – АД обычно применяют двигатель с фазным ротором с включенным в цепь ротора добавочным сопротивлением.
Увеличение средних потерь мощности в роторе АД за время пуска
 . (6.147)
. (6.147)
Величина добавочного сопротивления (приведенного к обмотке статора), включаемого в роторную цепь
 , (6.148)
, (6.148)
где Мп.ср – средний пусковой момент АД;
R´2 – активное сопротвление фазы ротора, приведенное к обмотке статора;
|
 ΔР2ном –
переменные номинальные потери мощности в роторе АД.
ΔР2ном –
переменные номинальные потери мощности в роторе АД.
![]() . (6.149)
. (6.149)
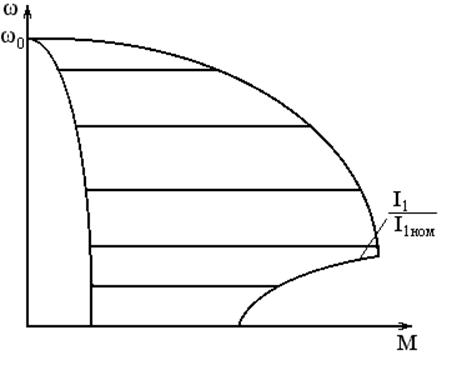
Механические
характеристики в замкнутой системе показаны на рис.6.3. Область регулирования
скорости ограни чена максимальным и минимальным
напряжениями статора и допустимым током статора I1.
чена максимальным и минимальным
напряжениями статора и допустимым током статора I1.
7. РАСЧЕТ ПАРАМЕТРОВ ХАРАКТЕРИСТИК
ДЛЯ ТОЧНОЙ ОСТАНОВКИ ЭЛЕКТРОПРИВОДА
Для ряда транспортных устройств (лифты, краны, подъемники и пр.) предъявляются требования к точности останова рабочего органа при торможениии в заданной точке пути. Величины, определяющие путь торможения ΔS в условиях работы механизма не остаются постоянными, а изменяются в более или менее широких пределах. Задача состоит в ограничении отклонений пути торможения от его среднего значения допустимыми пределами ΔSдоп. Для обеспечения точной остановки рабочего органа обычно применяют снижение его скорости перед остановкой.
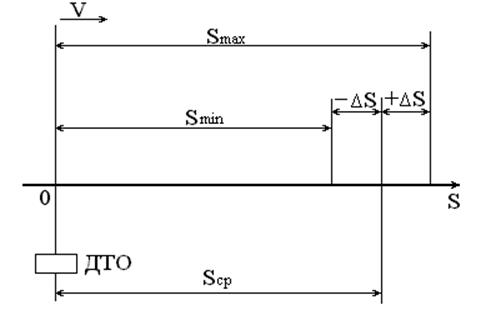
Рис.7. 1. Схема остановки рабочего органа. ДТО – датчик точной остановки.
Неточность останова механизма может быть выражена в виде
 , (7.1)
, (7.1)
где ωср, tср, Ј∑ср, МТ.ср, – средние значения угловой скорости механизма; времени срабатывания аппаратуры, дающей команду на торможение; момента инерции механизма; суммарного тормозного момента;
∆ω, ∆t, ∆Ј, ∆МТ – максимальные отклонения угловой скорости механизма; времени срабатывания аппаратуры;момента инерции; тормозного момента, возможные в процессе работы механизма.
Средние значения величин находим следующим образом
 ; (7.2)
; (7.2)
 ; (7.3)
; (7.3)
![]() ; (7.4)
; (7.4)
![]() ; (7.5)
; (7.5)
где Мс.mαx, Мс.min – максимальный и минимальный статические моменты;
МТ – момент механического тормоза.
Тормозные моменты тормозов, устанавливаемых на валу двигателя, обычно принимают равными
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.