ксх –
коэффициент, зависящий от схемы включения обмоток статора к источнику постоянного
тока. В частности, при подключении последовательно двух фаз статора к источнику
постоянного тока ![]() ;
;
 – относительная скорость
ротора;
– относительная скорость
ротора;
Iпост – величина постоянного тока, протекающего по обмоткам статора.
6.8. Расчет статических характеристик
АД при частотном управлении
В промышленных электроприводах распространены системы частотного управленияАД со стабилизацией потоков (потокосцеплений) статора Ф1(ψ1), взаимоиндукции Фт(ψт) и ротора Ф2(ψ2).
При выполнении законов частотного управления Ф1, Фт=const механическая характеристика АД выражается формулой
 , (6.114)
, (6.114)
где Мк – критический момент, зависящий от закона частотного управления;
sак – критическое значение параметра абсолютного скольжения, зависящее от закона частотного управления;
α, ν – соответственно относительные частота и угловая скорость:
 ;
;  ; (6.115)
; (6.115)
ω0ном – синхронная угловая скорость двигателя при номинальной частоте fном.
При частотном управлении по закону Ф1=const:
 ; (6.116)
; (6.116)
 ; (6.117)
; (6.117)
 ;
;  ;
(6.118)
;
(6.118)
![]() ; (6.119)
; (6.119)
![]() , (6.120)
, (6.120)
где Х1ном, Х´2ном, Хμ.ном – индуктивные сопротивления схемы замещения АД при номинальной частоте;
I1ном – номинальный ток фазы статора.
При частотном управлении по закону Фт=const критический момент и критическое абсолютное скольжение рассчитываются по формулам:
 ; (6.121)
; (6.121)
 . (6.122)
. (6.122)
Для каждого значения частоты f (или α), чтобы поддержать принятый закон частотного управления необходимо к статору двигателя подводить напряжение
 ; (6.123)
; (6.123)
где
 ; (6.124)
; (6.124)
 ; (6.125)
; (6.125)
 ; (6.126)
; (6.126)
![]() ; (6.127)
; (6.127)
![]() ; (6.128)
; (6.128)
![]() . (6.129)
. (6.129)
Пусковой момент Мп при данном α находим из (6.114) при ν=0:
 . (6.130)
. (6.130)
Критический момент Мк будет при
![]() (6.131)
(6.131)
для двигательного режима работы и
![]() (6.132)
(6.132)
для генераторного режима.
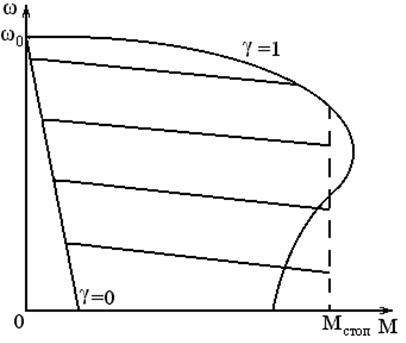
6.9. Расчет механических характеристик аснхронного электропривода с импульсным регулированием сопротивления в цепи ротора (ИРС – АД)
Уравнение механической характеристики имеет вид
 , (6.133)
, (6.133)
где ω0.з. – фиктивная скорость идеального холостого хода,

βз.с. – модуль жесткости механической характеристики в замкнутой системе
 , (6.134)
, (6.134)
км – коэффициент пропорциональности для электромагнитного момента, Нм/А;
крс – коэффициент усиления регулятора скорости;
кос – коэффициент обратной связи по скорости, Вс/рад;
кот – коэффициент обратной связи по току, Ом.
Обычно величиной βз.с. задаются, исходя из требований, предъявляемых к электроприводу. Другие коэффициенты, входящие в (6.134) определяются следующим образом:
 , (6.135)
, (6.135)
где
 , (6.136)
, (6.136)
Rγ – определяется по формуле
 , (6.137)
, (6.137)
Х´1 – индуктивное сопротвление статора, приведенное к обмотке ротора:
 ; (6.138)
; (6.138)
R´1 – активное сопротвление статора, приведенное к обмотке ротора:
 ; (6.139)
; (6.139)
|
 ΔUв –
падение напряжения на вентиле (обычно ΔUв=1).
ΔUв –
падение напряжения на вентиле (обычно ΔUв=1).
Коэффициент обратной связи по скорости определяется крутизной тахогенератора и коэффициентом передачи датчика скорости
 , (6.140)
, (6.140)
 где Uз.с.мах – максимальное значение напряжения задания скорости
(обычно Uз.с.мах=5В или Uз.с.мах=10В);
где Uз.с.мах – максимальное значение напряжения задания скорости
(обычно Uз.с.мах=5В или Uз.с.мах=10В);
ω0мах – максимальное значение скорости идеального хлостого хода двигателя.
Выходное напряжение датчика скорости
![]() ; (6.141)
; (6.141)
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.