Для построения
квазиоптимальных фильтров выразим среднеквадратическую ошибку через
спектральные плотности мощности некоррелированных сигнала и аддитивной помехи.
Структурная схема устройства, формирующего случайный процесс ![]() из сигнала
из сигнала ![]() и шума
и шума ![]() , приведена на рис. 3.4, где
, приведена на рис. 3.4, где ![]() – комплексная частотная характеристика
квазиоптимального фильтра.
– комплексная частотная характеристика
квазиоптимального фильтра.
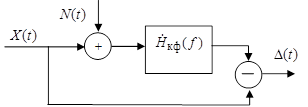
Рис. 3.4
Из данного рисунка следует,
что спектральная плотность мощности процесса ![]() равна
равна
 .
.
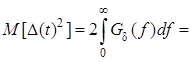
В этом случае среднеквадратическая ошибка
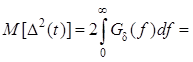
 .
.
Пример 3.2 (продолжение примера 3.1). Используем в качестве квазиоптимального фильтра Винера идеальный фильтр нижних частот с передаточной функцией
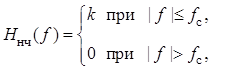 где
где ![]() –
частота среза,
–
частота среза, ![]() – коэффициент усиления. Эти два
параметра подлежат определению при оптимизации данного фильтра. Подставив в , получим
– коэффициент усиления. Эти два
параметра подлежат определению при оптимизации данного фильтра. Подставив в , получим



 , где
, где ![]() –
спектральная плотность мощности случайного процесса
–
спектральная плотность мощности случайного процесса ![]() .
Оптимальные значения параметров квазиоптимального фильтра можно найти,
приравняв к нулю частные производные этого выражения по
.
Оптимальные значения параметров квазиоптимального фильтра можно найти,
приравняв к нулю частные производные этого выражения по ![]() и
и
![]() . К сожалению, полученная при этом система
уравнений является нелинейной и ее точное решение затруднительно. Однако, как
показывает анализ, достаточную точность имеет решение, которое можно найти при
линеаризации функции
. К сожалению, полученная при этом система
уравнений является нелинейной и ее точное решение затруднительно. Однако, как
показывает анализ, достаточную точность имеет решение, которое можно найти при
линеаризации функции ![]() :
:
 .
.
В этом приближении оптимальные параметры равны
![]() ,
,  .
.
В некоторых
радиотехнических системах сигнал искажается не только шумом, но и линейной
системой с известной импульсной характеристикой. Например, по данным измерения,
скорости объекта ![]() необходимо оценить траекторию
его перемещения
необходимо оценить траекторию
его перемещения ![]() . Связь между
. Связь между ![]() и
и ![]() описывается
линейным оператором (перемещение равно интегралу от скорости).
описывается
линейным оператором (перемещение равно интегралу от скорости).
Пусть наблюдаемый процесс
 , где
, где ![]() –
импульсная характеристика искажающей линейной системы. Оцениваемый процесс
–
импульсная характеристика искажающей линейной системы. Оцениваемый процесс ![]() и шум
и шум ![]() являются
некоррелированными случайными процессами с известными спектральными плотностями
мощности
являются
некоррелированными случайными процессами с известными спектральными плотностями
мощности ![]() и
и ![]() . Тогда,
используя соотношения, приведенные во втором разделе, получим
. Тогда,
используя соотношения, приведенные во втором разделе, получим
![]() ,
,
![]() .
.
В этом случае комплексная частотная характеристика фильтра Винера и минимальная среднеквадратическая ошибка соответственно равны
 ,
,
 .
.
При отсутствии шума (![]() ) фильтр Винера вырождается в так
называемый инверсный фильтр
) фильтр Винера вырождается в так
называемый инверсный фильтр
 .
.
Инверсный фильтр, по сути,
является обратным оператором по отношению к искажающему фильтру ![]() .
.
Пример 3.3. Предположим, что наблюдаемый сигнал
![]() , где дифференцируемый оцениваемый
процесс
, где дифференцируемый оцениваемый
процесс ![]() и белый шум
и белый шум ![]() являются
некоррелированными взаимно стационарными случайными процессами с известными
спектральными плотностями мощности
являются
некоррелированными взаимно стационарными случайными процессами с известными
спектральными плотностями мощности ![]() и
и  .
.
Если для оценки ![]() использовать инверсный фильтр, который в
данном случае будет идеальным интегратором, то
использовать инверсный фильтр, который в
данном случае будет идеальным интегратором, то
![]() .
.
Отсюда следует, что непосредственное
интегрирование наблюдаемого сигнала ![]() приведет к тому, что
дисперсия шума на выходе интегратора (см. пример 2.7), а следовательно, и
среднеквадратическая ошибка оценивания будут бесконечно большими. Это объясняется
тем, что при
приведет к тому, что
дисперсия шума на выходе интегратора (см. пример 2.7), а следовательно, и
среднеквадратическая ошибка оценивания будут бесконечно большими. Это объясняется
тем, что при ![]() амплитудно-частотная характеристика
инверсного фильтра
амплитудно-частотная характеристика
инверсного фильтра ![]() . Поэтому даже при малых
интенсивностях белого шума дисперсия шума на выходе интегратора равна бесконечности.
. Поэтому даже при малых
интенсивностях белого шума дисперсия шума на выходе интегратора равна бесконечности.
Комплексная частотная характеристика дифференциатора
![]() , тогда
, тогда
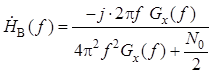 ,
,
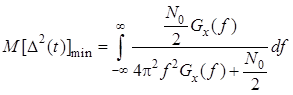 .
.
Определенный интеграл в для дифференцируемого процесса ![]() сходится, т.е. среднеквадратическая ошибка
оценивания не равна бесконечности. В отличие от инверсного фильтра,
сходится, т.е. среднеквадратическая ошибка
оценивания не равна бесконечности. В отличие от инверсного фильтра, ![]() при
при ![]() . Это
свойство амплитудно-частотной характеристики фильтра Винера обеспечивает
конечность среднеквадратической ошибки оценивания.
. Это
свойство амплитудно-частотной характеристики фильтра Винера обеспечивает
конечность среднеквадратической ошибки оценивания.
1. Почему значение константы ![]() в не влияет на отношение сигнал/шум на
выходе согласованного фильтра?
в не влияет на отношение сигнал/шум на
выходе согласованного фильтра?
2. Что общего между сигналом ![]() и ковариационной функцией шума
и ковариационной функцией шума ![]() на выходе согласованного фильтра?
на выходе согласованного фильтра?
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.