 больше, чем при
больше, чем при ![]() . Поэтому производная от по параметру
. Поэтому производная от по параметру ![]() при
при
![]() равна:
равна:
 , или с учетом
, или с учетом
 .
.
Подставив в ![]() и проведя несложные преобразования, получим
и проведя несложные преобразования, получим

 .
.
Очевидно, что данное равенство будет всегда выполняться при равенстве нулю выражения в скобках, т.е. когда
 .
.
Уравнение называется уравнением Винера–Хопфа.
Импульсная характеристика ![]() , удовлетворяющая
уравнению Винера–Хопфа, минимизирует среднеквадратическую ошибку, а фильтр с
такой характеристикой называется фильтром Винера. Поэтому задача синтеза оптимального
фильтра сводится к решению интегрального уравнения Винера–Хопфа относительно
, удовлетворяющая
уравнению Винера–Хопфа, минимизирует среднеквадратическую ошибку, а фильтр с
такой характеристикой называется фильтром Винера. Поэтому задача синтеза оптимального
фильтра сводится к решению интегрального уравнения Винера–Хопфа относительно ![]() . Очевидно, что интеграл в представляет собой интеграл свертки.
Взяв преобразование Фурье от левой и правой частей уравнения Винера–Хопфа,
получим
. Очевидно, что интеграл в представляет собой интеграл свертки.
Взяв преобразование Фурье от левой и правой частей уравнения Винера–Хопфа,
получим
![]() , откуда
, откуда
 , где
, где ![]() –
комплексная частотная характеристика фильтра Винера,
–
комплексная частотная характеристика фильтра Винера, ![]() –
взаимная спектральная плотность мощности наблюдаемого случайного процесса
–
взаимная спектральная плотность мощности наблюдаемого случайного процесса ![]() и сообщения
и сообщения ![]() ,
, ![]() – спектральная плотность мощности
– спектральная плотность мощности ![]() . Здесь учтено, что
. Здесь учтено, что ![]() является
вещественной функцией [5]. Импульсную характеристику фильтра Винера можно
найти, взяв обратное преобразование Фурье от
является
вещественной функцией [5]. Импульсную характеристику фильтра Винера можно
найти, взяв обратное преобразование Фурье от ![]() . На
этом синтез фильтра Винера завершен.
. На
этом синтез фильтра Винера завершен.
Найдем минимальное значение среднеквадратической ошибки для линейного фильтра. В общем случае
![]()


 , где
, где ![]() –
дисперсия сообщения
–
дисперсия сообщения ![]() . Из с учетом уравнения Винера–Хопфа
следует, что минимальное значение среднеквадратической ошибки линейной оценки
. Из с учетом уравнения Винера–Хопфа
следует, что минимальное значение среднеквадратической ошибки линейной оценки
![]()
 ,
где
,
где ![]() –
дисперсия оценки
–
дисперсия оценки ![]() . Здесь учтено, что оценка является
реакцией линейной системы с импульсной характеристикой
. Здесь учтено, что оценка является
реакцией линейной системы с импульсной характеристикой ![]() на
случайный процесс
на
случайный процесс ![]() и, следовательно, ее дисперсия
определяется формулой . Таким образом, минимальная
среднеквадратическая ошибка равна разности дисперсий оцениваемого процесса и
его оценки, которые можно выразить через интегралы от соответствующих
спектральных плотностей мощности следующим образом
и, следовательно, ее дисперсия
определяется формулой . Таким образом, минимальная
среднеквадратическая ошибка равна разности дисперсий оцениваемого процесса и
его оценки, которые можно выразить через интегралы от соответствующих
спектральных плотностей мощности следующим образом
 ,
,
 .
.
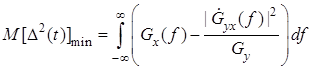
Для определения была использована формула . Подставив и в , выразим величину минимальной
среднеквадратической ошибки ![]() через интеграл от
разности спектральных плотностей мощности
через интеграл от
разности спектральных плотностей мощности
 .
.
Подставляя в выражение для передаточной функции фильтра Винера , получим
 .
.
Приведем выводы по полученным результатам.
1. Из уравнения Винера–Хопфа следует, что
для отыскания оптимальной линейной оценки необходимо знать только ![]() и
и ![]() (или
(или ![]() и
и ![]() ). Для
вычисления минимальной среднеквадратической ошибки также необходимо знать эти
характеристики. Любые другие статистические характеристики сигнала и помехи
оказываются бесполезными.
). Для
вычисления минимальной среднеквадратической ошибки также необходимо знать эти
характеристики. Любые другие статистические характеристики сигнала и помехи
оказываются бесполезными.
2. Для всех гауссовских и негауссовских
процессов, имеющих одинаковые ![]() и
и ![]() , оптимальный линейный фильтр является
одинаковым и обладает одинаковой среднеквадратической ошибкой.
, оптимальный линейный фильтр является
одинаковым и обладает одинаковой среднеквадратической ошибкой.
3. Если сообщение ![]() ,
помеха
,
помеха ![]() и наблюдаемый сигнал
и наблюдаемый сигнал ![]() являются совместно гауссовскими
стационарно связанными случайными процессами, то фильтр Винера является
абсолютно оптимальным, т.е. обеспечивает минимальную среднеквадратическую
ошибку в классе всех возможных систем как линейных, так и нелинейных. Это
следует из того, что для центрированных гауссовских случайных процессов
ковариационные функции являются исчерпывающими характеристиками [5].
являются совместно гауссовскими
стационарно связанными случайными процессами, то фильтр Винера является
абсолютно оптимальным, т.е. обеспечивает минимальную среднеквадратическую
ошибку в классе всех возможных систем как линейных, так и нелинейных. Это
следует из того, что для центрированных гауссовских случайных процессов
ковариационные функции являются исчерпывающими характеристиками [5].
4. Для фильтра Винера ошибка не
коррелирована с наблюдаемым сигналом ![]() . Это свойство непосредственно
вытекает из :
. Это свойство непосредственно
вытекает из :

![]() .
.
5. Если сообщение ![]() ,
помеха
,
помеха ![]() и наблюдаемый сигнал
и наблюдаемый сигнал ![]() являются совместно гауссовскими
стационарно связанными случайными процессами, то ошибка статистически не
зависит от наблюдаемого сигнала. Это свойство вытекает непосредственно из того,
что некоррелированные гауссовские случайные величины являются статистически
независимыми [5].
являются совместно гауссовскими
стационарно связанными случайными процессами, то ошибка статистически не
зависит от наблюдаемого сигнала. Это свойство вытекает непосредственно из того,
что некоррелированные гауссовские случайные величины являются статистически
независимыми [5].
Если оцениваемый процесс ![]() и шум
и шум ![]() являются
некоррелированными случайными процессами и
являются
некоррелированными случайными процессами и
![]() , то ковариационная функция наблюдаемого
процесса
, то ковариационная функция наблюдаемого
процесса ![]() и взаимная ковариационная функция
и взаимная ковариационная функция ![]() и сообщения
и сообщения ![]() :
:
![]() ,
,
![]() .
.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.