![]() - известная
скорость точки этого тела;
- известная
скорость точки этого тела;
![]() - мгновенный
центр скоростей (мгновенный центр вращения);
- мгновенный
центр скоростей (мгновенный центр вращения);
![]() - угловая
скорость тела относительно центра
- угловая
скорость тела относительно центра ![]() ;
;
![]() ,
, ![]() -
расстояние точек
-
расстояние точек ![]() и
и ![]() от
центра
от
центра ![]() (мгновенные радиусы).
(мгновенные радиусы).
Вектор
искомой скорости ![]() перпендикулярен
мгновенному радиусу
перпендикулярен
мгновенному радиусу ![]() . При определении угловой
скорости звена следует использовать свойство, что скорость вращения звена в
плоскости по модулю и направлению равна угловой скорости звена относительно
мгновенного центра скоростей
. При определении угловой
скорости звена следует использовать свойство, что скорость вращения звена в
плоскости по модулю и направлению равна угловой скорости звена относительно
мгновенного центра скоростей
![]()
Для определения ускорений точек механизма следует использовать векторное равенство
![]() ;
; ![]() , (1)
, (1)
где:
![]() - точка, ускорение которой известно
по условиям задачи или определено при решении задачи ранее;
- точка, ускорение которой известно
по условиям задачи или определено при решении задачи ранее; ![]() - точка, ускорение которой надо
найти.
- точка, ускорение которой надо
найти.
При
решении задач модуль ускорения ![]() может быть
определен по формулам:
может быть
определен по формулам:
![]() или
или ![]()
![]() ,
, ![]() находятся
из уравнения (1), записанного в проекциях на оси координат
находятся
из уравнения (1), записанного в проекциях на оси координат ![]() ,
, ![]() .
.
Угловое
ускорение звена определяем из соотношения ![]()
Например
![]()
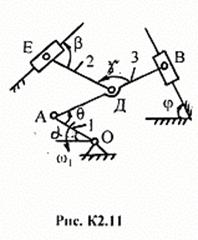
Плоский
механизм (рис. К2.11) состоит из стержней 1, 2, 3 и ползунов ![]() ,
, ![]() ,
соединенных друг с другом и с неподвижной опорой
,
соединенных друг с другом и с неподвижной опорой ![]() шарнирами.
шарнирами.
Определить
скорости ползунов ![]() ,
, ![]() ,
угловую скорость звена
,
угловую скорость звена ![]() , ускорение точки
, ускорение точки ![]() и угловое ускорение звена
и угловое ускорение звена ![]() .
.
Дано:
![]() м,
м, ![]() м,
м,
![]() .
. ![]()
![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() 1/с,
1/с,
![]() 1/с2.
1/с2.
Определить:
![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() .
.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.