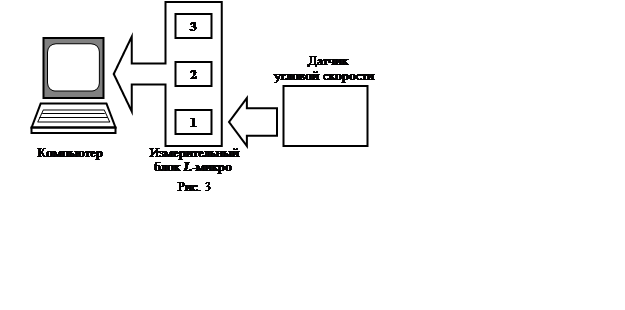
в) Включите режим регистрации данных компьютером. Для этого выберите пункт меню «запуск» (Отметим, что запись данных осуществляется в течение 20 секунд с момента выбора пункта меню).
г) Раскрутите систему грузов с помощью специального устройства (7) и резко поднимите его вверх, чтобы позволить грузам сдвинуться до резиновых шайб, ограничивающих их движение по стержням (4). Добейтесь того, чтобы после разлёта грузы останавливались на одинаковом расстоянии r2от оси вращения, не застревая по дороге и не отскакивая от упоров.
|
Таблица 1
|
Н, м |
R1 , м |
R2, м |
m1, кг |
m2, кг |
|
0,019 |
0,014 |
0,003 |
Начальной скоростью вращения системы следует считать максимальное значение угловой скорости. Участок возрастания угловой скорости на графике соответствует раскрутке системы, а участок, где угловая скорость убывает – разлету грузов, то есть – движению в отсутствие внешних сил. (Моментом сил трения пренебрегаем.)
Таблица 2
|
№ |
r1, м |
r2 , м |
w1, рад/с |
Dw1, рад/с |
w2, рад/с |
Dw2, рад/с |
I1+I2, кг×м2 |
I1¢+I2¢, кг×м2 |
|
1 |
||||||||
|
2 |
||||||||
|
3 |
||||||||
|
4 |
||||||||
|
5 |
||||||||
|
6 |
||||||||
|
7 |
||||||||
|
8 |
||||||||
|
9 |
|
Измерения необходимо провести при одинаковых начальных (r1) и трёх различных конечных положениях r2 ограничительных резиновых шайб, каждый раз проводя по 3 запуска системы (итого – 9 измерений).
 5. Используя данные экспериментов (см. таблицу 1),
вычислите значения совокупных моментов инерции грузов I1 +I2и I1¢ +I2¢соответственно
до и после разлёта. Грузы можно считать однородными цилиндрами, вращающимися
относительно оси, параллельной той, которая проходит через центр масс цилиндра
перпендикулярно его оси симметрии.
5. Используя данные экспериментов (см. таблицу 1),
вычислите значения совокупных моментов инерции грузов I1 +I2и I1¢ +I2¢соответственно
до и после разлёта. Грузы можно считать однородными цилиндрами, вращающимися
относительно оси, параллельной той, которая проходит через центр масс цилиндра
перпендикулярно его оси симметрии.
При расчётах следует применить теорему Штейнера: момент инерции тела I относительно произвольной оси равен сумме момента инерции I0 относительно оси, параллельной данной и проходящей через центр масс тела, и произведения массы тела т на квадрат расстояния d между осями:
I = I0 + md2. (7)
В нашем случае расстояния между осями OO¢и АА¢(или ВВ¢) – см. рис. 1, – OO¢и СС¢, OO¢и DD¢,равны r1, и r2 соответственно, причём момент инерции Iгруза – полого цилиндра с внешним радиусом R1, внутренним радиусом R2, высотой Н и массой m относительно оси АА¢рассчитывается по формуле:
I=![]() (3R12
+ 3R22 + H2). (8)
(3R12
+ 3R22 + H2). (8)
Значения m, R1 , R2 и Н возьмите из таблицы 1.
Таким образом, момент инерции грузов до разлёта вычисляется по формуле
I1 + I2= (m1+ m2)[![]() (3R12 + 3R22 +H2) + r12], (9)
(3R12 + 3R22 +H2) + r12], (9)
а после разлёта – по формуле
I1 ¢+ I2¢= (m1+
m2)[![]() (3R12 + 3R22 +H2) + r22]. (10)
(3R12 + 3R22 +H2) + r22]. (10)
Результаты расчётов запишите в таблицу 2.
|
Таблица 3
|
IМ, кг×м2 |
RМ, м |
l, м |
т0, кг |
IС , кг×м2 |
IП, кг×м2 |
|
0,000002 |
0,0125 |
0,160 |
0,032 |
Момент инерции спицы – тонкого однородного стержня относительно оси, проходящей через центр масс стержня перпендикулярно стержню, рассчитывается по формуле
I=![]() m0l2 .
(11)
m0l2 .
(11)
В нашем случае спицы вращаются относительно другой оси - ОО¢, которая сдвинута от той, для которой получена формула (9), на расстояние
d=RМ+![]() .
.
Расчёт момента инерции относительно этой оси можно выполнить с помощью теорема Штейнера:
IС = ![]() m0l2 + m0
m0l2 + m0 ,
(12)
,
(12)
и, следовательно, – вычислить момент инерции IП всей подвижной части без грузов: муфты и двух спиц:
IП = IМ + 2 . (13)
. (13)
Результаты вычислений запишите в таблицу 3.
|
7. Пользуясь формулой (5), а также данными таблиц 2 и 3, рассчитайте значения моментов импульса Liсистемы (включающей в себя муфту, спицы и грузы) до разлёта грузов и Li¢ - после их разлёта. Результаты запишите в таблицу 4.
Таблица 4
|
№ |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
средние |
|
L, кг×м2×с- 1 |
||||||||||
|
L¢, кг×м2×с- 1 |
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.