величины, определяемые согласно выражениям:
 (3.17)
(3.17)
 (3.18)
(3.18)
Рассчитаем отдельно каждую составляющую решения.
Первая составляющая решения выходной функции:
 Вторая составляющая решения выходной
функции:
Вторая составляющая решения выходной
функции:
 . (3.19)
. (3.19)
Первоначально определим производную по времени t от функции Грина:
 (3.20)
(3.20)
Подставим уравнение (3.20) в (3.19):

Выходная величина, в результате суммирования двух составляющих решения:
 (3.21)
(3.21)
Как видно из выражения (3.21) она является функцией двух аргументов: пространственной координаты х и временной координаты t. Построим график этой функции при фиксированном времени t при помощи программы MathCAD. На рис.3.3. и 3.4 – плоские графики, при чем на первом графике при t=2с струны выпуклая, а на втором - t=4с она вогнутая.
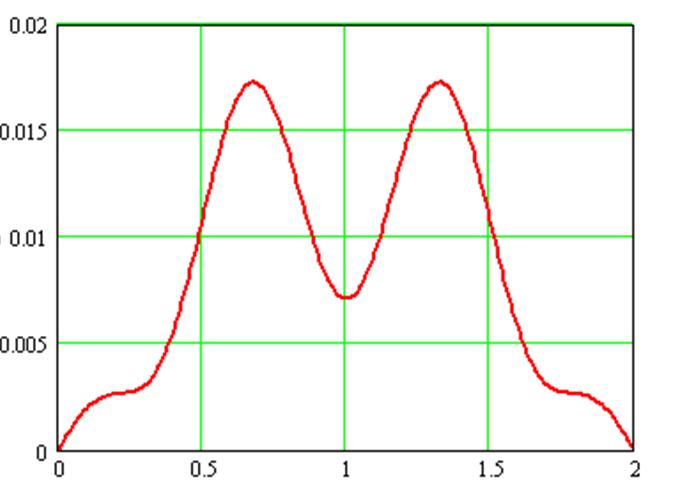
Рис.3.3 – График выходной величины Q(x,t) при t=2с
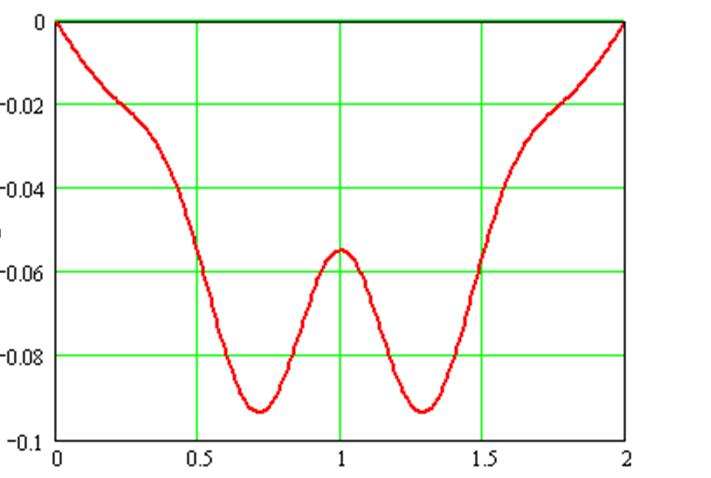
Рис.3.4 – График выходной величины Q(x,t) при t=4с
На рис.3.5 представлен объемный график, позволяющий видеть, как нарастают колебания струны во времени.
Рис.3.5 – Зависимость выходной величины от времени t и координаты х
4 Оценка динамических свойств объекта моделирования
Для рассматриваемой струны стандартизирующая функция представляется в виде суммы, учитывающей входное возмущение и начальное распределения (3.12) или в общем виде:
![]() ,
(3.22)
,
(3.22)
где ![]() ;
;
![]() ;
;
 ; А=1.
; А=1.
Преобразуем по Лапласу (см.Приложение) слагаемые:
 ;
(3.23)
;
(3.23)
 .
(3.24)
.
(3.24)
Тогда стандартизирующая функция в преобразованиях Лапласа:
 . (3.25)
. (3.25)
При структурном представлении распределенный объект (струна) с передаточной функцией W(x,ξ,p), входное воздействие которого описывается выражением (3.25), можно представить в виде рис.3.6.
Рис.3.6 – Структурное представление струны
Перенесем сумматор через звено с передаточной функцией W(x,ξ,p) (рис.3.7).
Выходную распределенную величину тогда можно найти следующим образом:
 . (3.26)
. (3.26)
Так как φ(ξ)=1, то передаточная функция х-блока может быть найдена как интеграл по переменной ξ от заданной передаточной функции:
 (3.27)
(3.27)
Рис.3.7 – Преобразование структурного представления струны
Выполним данное преобразование:
 (3.28)
(3.28)
Рассчитаем второе слагаемое:

 Выходная
величина с учетом (3.26), (3.28) и последнего выражения:
Выходная
величина с учетом (3.26), (3.28) и последнего выражения:
 Предположим,
что начальное отклонение струны равно 0. При этом в качестве единственного
входного (управляющего) воздействия рассматривается
Предположим,
что начальное отклонение струны равно 0. При этом в качестве единственного
входного (управляющего) воздействия рассматривается ![]() .
Тогда выходная распределенная величина:
.
Тогда выходная распределенная величина:
![]() . (3.29)
. (3.29)
Построим логарифмическую амплитудно-частотную характеристику (ЛАЧХ) для точки х=l/2. С этой целью запишем частотную передаточную функцию в этой точке:
 . (3.30)
. (3.30)
Тогда ЛАЧХ, построенная с использованием программы MathCAD представлена на рис.3.8.
В первом приближении построенную ЛАЧХ можно аппроксимировать стандартными типовыми наклонами 0 и -40 дб/дек и записать упрощенную передаточную функцию в виде апериодического звена второго порядка:
 ,
(3.31)
,
(3.31)
где k,T1 – коэффициент преобразования и постоянная времени соответственно.
Их величины определяются из рис.3.8:
![]() ,
,
 ;
;
 .
.
Рис.3.8 – Логарифмическая амплитудно-частотная характеристика
Тогда аппроксимированная передаточная функция принимает вид:
 .
(3.32)
.
(3.32)
Данная передаточная функция получена для центра струны и позволяет применять методы исследования согласно теории автоматического управления как для системы с сосредоточенными параметрами.
ВАРИАНТЫ ЗАДАНИЙ
Варианты заданий выбираются по группам согласно номеру в журнале. Например, пятый студент из второй группы – вариант 2.5, десятый студент из первой группы – вариант 1.4.
Вариант 1.1
Сформулировать и решить краевую задачу о вынужденных колебаниях кольцевой мембраны, упруго закрепленной на внешнем и внутреннем радиусах под действием внешней плотности силы g(r,t)=A·sin(B·t). Начальные условия принять нулевыми.

Вариант 1.2
Поставить и решить краевую задачу определения температурного поля диска радиусом R, который в начальный момент времени нагрет равномерно до температуры Θ. На радиусе R температура диска поддерживается неизменной и равной Θ. Внешнее воздействие на диск описывается синусоидальным законом А·sin(D·t).
|
1 |
|
|
2 |
|
|
3 |
|
|
4 |
|
|
5 |
μk – положительные
корни уравнения: |
|
6 |
|
Вариант 1.3
Поставить и решить краевую задачу определения температурного поля диска радиусом R. В начальный момент времени температурное поле диска подчиняется закону F(r). На радиусе R температура диска изменяется по синусоидальному закону Θ·sin(D·t). Внешнее воздействие на диск отсутствует.
|
1 |
|
|
2 |
|
|
3 |
|
|
4 |
|
|
5 |
|
|
6 |
|
Вариант 1.4
Круглая однородная мембрана радиуса R, закрепленная по контуру, в начальный момент времени выпуклая (вид задать самостоятельно). В момент времени t=0 к поверхности мембраны приложена равномерно распределенная гармоническая сила плотностью g(r,t)=Asin(ωt). Сформулировать и решить краевую задачу при данных условиях. Начальную скорость принять равной нулевой.
|
1 |
|
|
2 |
|
|
3 |
|
|
4 |
|
|
5 |
μn –
положительные корни уравнения: |
|
6 |
|
Вариант 1.5
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.

 ,
,



 ,
,