
















































Билет №1.
1. Типовые законы управления рулями ЛА.
С помощью рулей ЛА обеспечивается управление перегрузкой и угловой стабилизацией.
![]() – сигнал, подаваемый на
РП (рулевые приводы):
– сигнал, подаваемый на
РП (рулевые приводы):
![]() – на элероны,
– на элероны,
![]() – на рули направления,
– на рули направления,
![]() – на рули высоты.
– на рули высоты.
Алгоритмы управления перегрузкой и угловой стабилизацией относятся к одному из двух классов.
1) В более простом случае (когда нет необходимости решать задачи дальней навигации – для ЛА воздушного боя: воздух – воздух, земля – воздух) применяются упрощенные законы управления, стабилизируются только угловая скорость и перегрузка:
![]() ,
,
![]() ,
,
![]() , т. е. угловая стабилизация осуществляется методом приведения
к 0 угловой скорости вращения с коррекцией траектории полета установками
поперечной перегрузки.
, т. е. угловая стабилизация осуществляется методом приведения
к 0 угловой скорости вращения с коррекцией траектории полета установками
поперечной перегрузки.
Положительным направлением отклонения любого управляющего органа считается то, которое ведет к устранению положительного отклонения регулируемой величины.
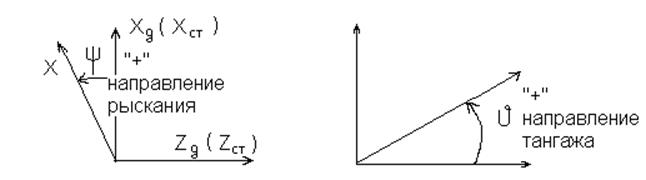
Для рулей высоты регулируемая величина – тангаж, для рулей направления – угловая скорость рыскания либо рыскание.
2) В общем случае (для ЛА, находящихся долгое время в атмосфере) законы управления выглядят следующим образом:
 , где
, где
![]() обычно выбирается таким большим, что не
требует проверки влияния этого слагаемого на устойчивость,
обычно выбирается таким большим, что не
требует проверки влияния этого слагаемого на устойчивость, ![]() обычно равен 0,
обычно равен 0, ![]() –
управляющая установка крена, слагаемое
–
управляющая установка крена, слагаемое ![]() обеспечивает
угловую стабилизацию, слагаемое
обеспечивает
угловую стабилизацию, слагаемое ![]() обеспечивает
демпфирование колебаний в переходном процессе обработки возмущений, слагаемое
обеспечивает
демпфирование колебаний в переходном процессе обработки возмущений, слагаемое  обеспечивает подавление статических
ошибок, вызванных производственной или иной асимметрией ЛА;
обеспечивает подавление статических
ошибок, вызванных производственной или иной асимметрией ЛА;
![]()
где H– текущая высота,
![]() –
– ![]() ,
, ![]() –
– ![]() разгружает СУ и снижает статические
ошибки,
разгружает СУ и снижает статические
ошибки, ![]() – управляющая установка тангажа, слагаемое
– управляющая установка тангажа, слагаемое
![]() обеспечивает угловую стабилизацию;
обеспечивает угловую стабилизацию;
![]() , где
слагаемое
, где
слагаемое![]() –
измеритель перегрузки, слагаемое
–
измеритель перегрузки, слагаемое ![]() – измеритель отклонений,
– измеритель отклонений,![]() – управляющая установка
рыскания, слагаемое
– управляющая установка
рыскания, слагаемое ![]() обеспечивает угловую стабилизацию.
обеспечивает угловую стабилизацию.
В формулу также могут быть добавлены слагаемые:
![]() – слагаемое дает пренебрежение углом
скольжения,
– слагаемое дает пренебрежение углом
скольжения,
![]() – слагаемое добавляется к формуле, если
существует проблема со стабилизацией внешнего контура.
– слагаемое добавляется к формуле, если
существует проблема со стабилизацией внешнего контура.
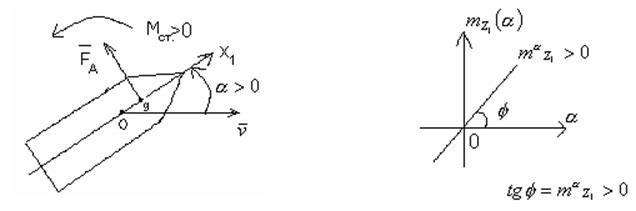
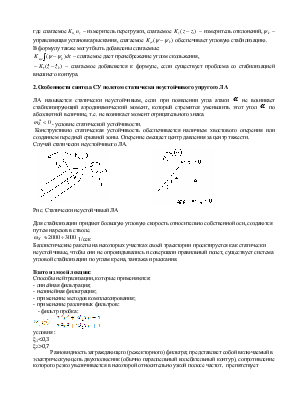
2.Особенности синтеза СУ полетом статически неустойчивого упругого ЛА
ЛА
называется статически неустойчивым, если при появлении угла атаки ![]() не возникает стабилизирующий
аэродинамический момент, который стремится уменьшить этот угол
не возникает стабилизирующий
аэродинамический момент, который стремится уменьшить этот угол ![]() по абсолютной величине, т.е. не возникает
момент отрицательного знака.
по абсолютной величине, т.е. не возникает
момент отрицательного знака.
![]() - условие статической устойчивости.
- условие статической устойчивости.
Конструктивно статическая устойчивость обеспечивается наличием хвостового оперения или созданием передней срывной зоны. Оперение смещает центр давления за центр тяжести.
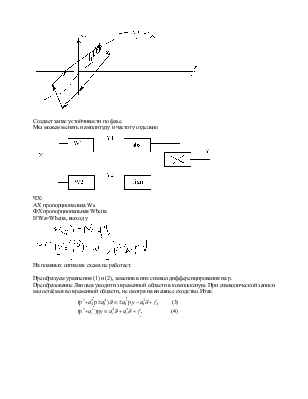
Случай статически неустойчивого ЛА.
|
|
|
Рис. Статически неустойчивый ЛА |
Для стабилизации придают большую угловую скорость относительно собственной оси, создаются путем нарезов в стволе.
![]() 1/сек
1/сек
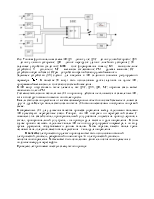
Баллистические ракеты на некоторых участках своей траектории проектируется как статически неустойчивые, чтобы они не опрокидывались и совершали правильный полет, существует система угловой стабилизации по углам крена, тангажа и рыскания.
Взято из моей лекции:
Способы нейтрализации, которые применяются:
- линейная фильтрация;
- нелинейная фильтрация;
- применение методов комплексирования;
- применение различных фильтров:
- фильтр пробка:
условия :
ξ1<0,3
ξ2>0,7
Разновидность заграждающего (режекторного) фильтра; представляет собой включаемый в электрическую цепь двухполюсник (обычно параллельный колебательный контур), сопротивление которого резко увеличивается в некоторой относительно узкой полосе частот, препятствует прохождению переменных токов в этой полосе частот и пропускает токи с частотами, лежащими за её пределами.
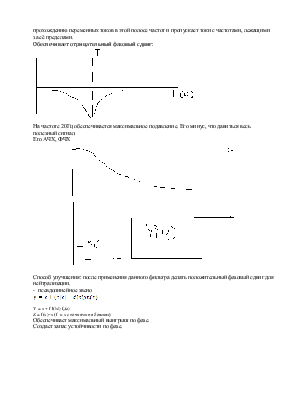
Обеспечивает отрицательный фазовый сдвиг:
На частоте 20Гц обеспечивается максимальное подавление. Его минус, что давиться весь полезный сигнал.
Его АЧХ, ФЧХ
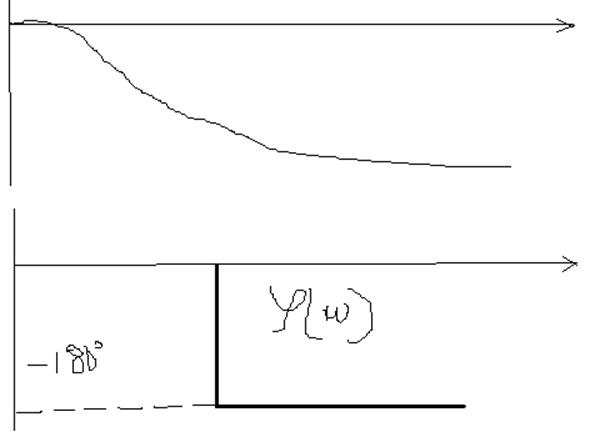
Способ улучшения: после применения данного фильтра делать положительный фазовый сдвиг для нейтрализации.
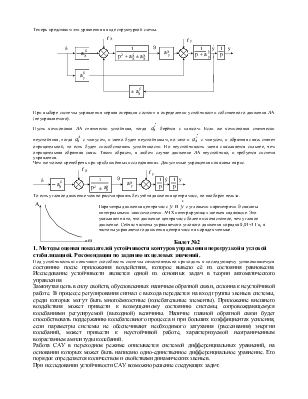
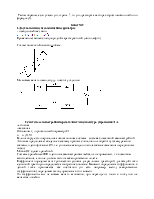
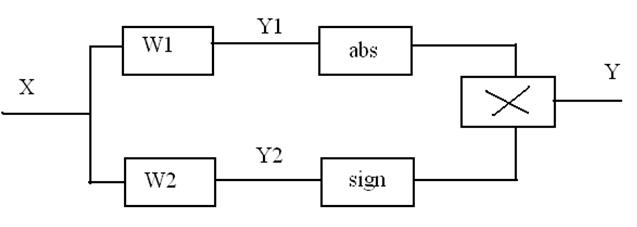
- псевдолинейное звено
![]()
Y = x + f1(|x|) f2(z)
Z = f(x)~x (f и x с точками на бошках)
Обеспечивает максимальный выигрыш по фазе.
Создает запас устойчивости по фазе.
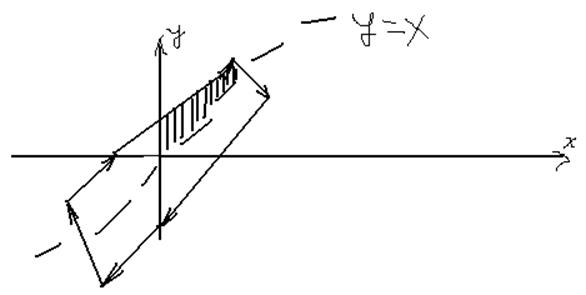
Создает запас устойчивости по фазе.
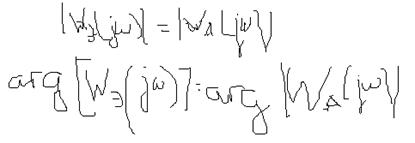
Мы можем менять и амплитуду и частоту отдельно
ЧХ: АХ пропорциональна Wa
ФХ пропорциональная Wbetta
If Wa=Wbetta, выход у
На плавных сигналах схема не работает.
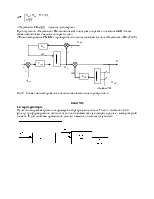
Преобразуем уравнения (1) и (2), заменив в них символ дифференцирования на р.
Преобразование Лапласа уводит из временной области в комплексную. При символической записи мы остаёмся во временной области, не смотря на внешнее сходство. Итак.
|
|
Теперь представим эти уравнения в виде структурной схемы.
При выборе системы управления первая операция состоит в определении устойчивости собственного движения ЛА (неуправляемого).
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.