1.Каждому параметру должна соответствовать проверка
2.Родился из практики синтеза методом макетирования радиотехнических систем). Проверяется характер функционирования системы в целом на некоторых контрольных тестах. В этих ситуациях задается область некой совокупности контролируемых переменных. Если переменные выходят из области, то 2-а варианта: идет на доработку или расширяются допуска.
Можно контролировать много
параметров, например, контролировать![]() по переходному
процессу.
по переходному
процессу.
Замена статистического исследования исследованием на детерминированных моделях как ускорение или удешевление синтеза: подход: детерминированный синтез с проверкой системы при изменении допусков:
- степень статической неустойчивости ОУ
- эффективность органов управления
- передаточное число по угловой скорости
- добротность РП и др.
Все допуска на все параметры разыгрываются. Есть 2-а метода приближения детерминированной постановки к стохастической:
1. Метод критических реализаций
2. Метод использования неоднозначной связи между случайными процессами и их спектральными плотностями.
1.По результатам статистического моделирования давно было сделано наблюдение: если в ходе проверки случается что-нибудь нежелательное, то это означает, что как минимум 2-а параметра вышли из ±2δ закона распределения. Исходный розыгрыш случайных параметров без моделирования может считаться приводящим к успеху без осуществления моделирования.
2.
Sx(w)®форма импульсов
Билет 20.
1. Основное кинематическое тождество методов наведения.
Для того чтобы иметь возможность получения уравнений для различных методов наведения, выведем основное кинематическое тождество.
Будем считать цель и перехватчик материальными точками. Также будем пренебрегать переходными процессами и запаздываниями. Получающиеся при этом упрощения очевидны; «загрубления» позволяют проводить содержательный и качественный анализ методов, сопоставлять эти методы друг с другом.
Пусть О – неподвижная точка. На рисунке 1 представлена схема взаимного расположения ракеты и цели.
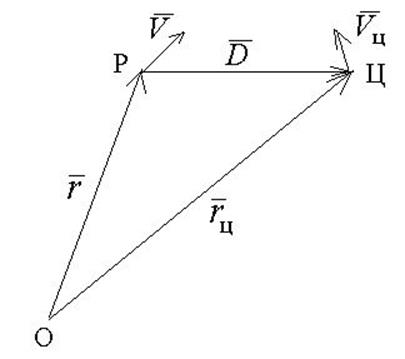
Рисунок 1 – Схема взаимного расположения ракеты (Р) и цели (Ц)
Введем
единичный орт ![]() , то есть,
, то есть, ![]() , а
, а ![]() .
Из простых геометрических соображений
.
Из простых геометрических соображений
![]() .
.
Продифференцируем левую и правую часть этого уравнения по времени, имеем
 .
(1)
.
(1)
Так как точка О неподвижна, то производная есть абсолютная скорость ракеты
Абсолютная скорость цели
 (2)
(2)
Производная орта(линии визирования) есть
 , где
, где ![]() - абсолютная скорость
- абсолютная скорость ![]() .
.
Подставим полученные соотношения в формулу (2):
 .
.
Таким образом, основное кинематическое соотношение, исходя из формулы (1), можно записать в виде
 .
(3)
.
(3)
Запишем уравнение (3) в проекциях на оси системы координат xy. Одну из осей свяжем с линией ракета-цель.
![]() , где
, где ![]() - орт оси z,
- орт оси z, ![]() . Обозначим
. Обозначим ![]() .
Тогда
.
Тогда ![]() ,
, ![]() .
.
Имеем такую систему уравнений
 (4)
(4)
К
этой системе уравнений для расчета траектории следует добавить уравнение метода
наведения ![]() .
. ![]() -
заданы. Система (4) содержит переменные:
-
заданы. Система (4) содержит переменные: ![]() .
.
Следует отметить, что при произвольном движении цели задача решается только методами численного интегрирования.
2. Режекторные фильтры.
условия :
ξ1<0,3
ξ2>0,7
Разновидность заграждающего (режекторного) фильтра; представляет собой включаемый в электрическую цепь двухполюсник (обычно параллельный колебательный контур), сопротивление которого резко увеличивается в некоторой относительно узкой полосе частот, препятствует прохождению переменных токов в этой полосе частот и пропускает токи с частотами, лежащими за её пределами.
Обеспечивает отрицательный фазовый сдвиг:

Режекторный фильтр (фильтр-пробка) подавляет определенную частоту во входном сигнале. Он может быть спроектирован непосредственно по z-диаграмме.
Билет 21.
1.Кинематические соотношения метода погони.
Метод погони – метод наведения, при котором во все время движения вектор скорости ЛА направлен на цель (рисунок 1).
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.