В техническом описании значение этих коэффициентов обычно приводят для места расположения гироприборов. Коэффициенты зависят от номера сечения.
Обычно упругие колебания приводят к нежелательным явлениям:
1. Появляются дополнительные механические напряжения. Их надо учитывать при расчете корпуса на прочность. Существуют недопустимые значения у*, или uu.
у* = 3 см ; Du = 10 - 12` ` – для жидкостных
Du = 6 – для РДТТ
2. В момент выключения двигателя появляются поперечные составляющие скорости, что приводит к ошибкам по дальности и боковому отклонению. Стараются двигатель отключать, когда нет упругих колебаний.
3. На основной полезный сигнал накладывается сигнал упругих колебаний, а т.к. система нелинейная, то проявляется эффект вибрационной линеаризации, следовательно изменяются коэффициенты передачи по полезному сигналу и рабочей точке может оказаться за пределами устойчивости.
4. Ухудшается работа некоторых приборов (в частности гироприборов). Гироскоп начинает работать на вибрирующем основании и тем самым понижается точность работы (эффект Магнуса-Капицы).
5. Относится к пилотируемому полёту. На космонавта действуют дополнительные перегрузки, действующие на психофизическое состояние космонавта.
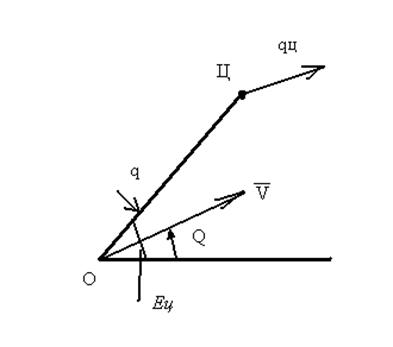
2. Метод пропорциональной навигации и его модификации.
![]() из условия
устойчивости
из условия
устойчивости ![]()
То
есть угловая скорость вектора скорости ракеты ![]() пропорциональна
угловой скорости линии Р-Ц.
пропорциональна
угловой скорости линии Р-Ц.
Метод пропорционального сближения является общим методом и из него, как частные случаи, следуют остальные методы, при различных значениях а.
Если а=1 – погоня с упреждением.
При стрельбе по малоподвижным целям а=2.
Запишем основное кинематическое тождество:
![]() - для малоподвижных
целей
- для малоподвижных
целей
Получилось
уравнение ![]() , которое при известном законе
изменения скорости и курсового угла цели может быть проинтегрировано в
квадратурах
, которое при известном законе
изменения скорости и курсового угла цели может быть проинтегрировано в
квадратурах
 при условии, что движение
происходит по кинематической траектории.
при условии, что движение
происходит по кинематической траектории.
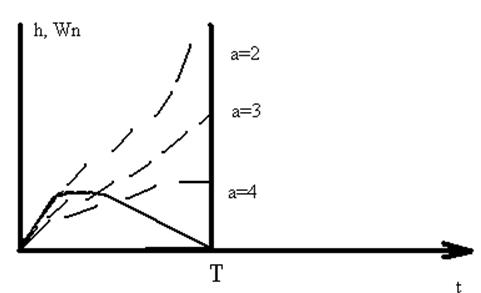
а=2 – гипербола
а=3 – прямая
а=4 – ограниченная

Если
не удаётся обеспечить нормальной, т.е. проекция скорости больше, чем скорость
убывания ![]() , то потребное нормальное
ускорение будет возрастать по мере сближения с целью.
, то потребное нормальное
ускорение будет возрастать по мере сближения с целью.
В
предположении, что начальное значение мгновенного промаха h
близко к нулю, в зависимости от навигационной постоянной ![]() , получаются разные графики изменения
потребного нормального ускорения.
, получаются разные графики изменения
потребного нормального ускорения.
В модифицированном методе пропорциональной навигации управляющая установка нормального ускорения вычисляется как
Для установки постоянной, равной 4, требуются дополнительные условия.
Билет №7
1. Способы обеспечения устойчивости СУ в диапазоне частот упругих колебаний
При данном исследовании делаем допущения:
1. система угловой стабилизации линейна,
2. полёт происходит вне атмосферы,
3. не учитываем влияние колебаний жидкости на все виды движения,
4. не учитываем влияние упругих колебаний на угловое движение жёсткого ЛА,
5. не учитываем инерционность элементов угловой стабилизации.
|
|
Тогда исследуемая структурная схема будет иметь следующий вид:
Используем традиционный закон управления. Если бы учли несколько тонов, то больше было бы параллельных цепочек.
|
|
Из рассмотрения данных картинок следует, что практически полезный сигнал циркулирует только через звенья жёсткого ЛА. А упругие колебания только через звено упругости, поэтому можно раздельно анализировать систему в диапазонах частот. В диапазоне частот упругих колебаний верхний канал можно не учитывать.
Для оценки устойчивости нужно найти характеристическое уравнение. Для оставшейся части схемы при условии, что имеет место устойчивый тон упругих колебаний, характеристическое уравнение будет выглядеть следующим образом:
|
|
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.