Системы телеуправления первого вида – координаты цели измеряются устройствами, размещенными на пункте управления.
Системы телеуправления второго вида – координаты цели измеряются бортовым координатором ЛА с последующей их передачей на пункт управления.
Выработка команд управления как в первом, так и во втором случае осуществляется наземным пунктом управления.
В системах телеуправления по лучу сигналы управления вырабатываются на борту ЛА по измеряемым отклонениям ЛА от оси луча радиолокатора (или оптического, или теплового), который перемещается в пространстве в соответствии с принятым методом наведения.
Наведение ЛА на цель происходит по отклонению реальной траектории его движения от кинематической траектории, определяемой методом наведения. Мера отклонения реальной траектории от кинематической называется параметром рассогласования (параметром управления). Система наведения измеряет параметр рассогласования и вырабатывает команды управления полетом ЛА.
Метод 3-х точек.
Недостаток: траектория – кривая; кривизна увеличивается по мере подлета к цели.
При следовании по траектории высоки потребные перегрузки. Кинематическая перегрузка возрастает при приближении к цели, даже если цель движется прямолинейно.
2 составляющие промаха:
- динамическая
-
кинематическая (при ![]() => сход с
кинематической траектории).
=> сход с
кинематической траектории).
Метод половинного спрямления.
(результаты по методу 3-х точек + результаты стрельбы в упрежденную точку)/2
Метод стрельбы в упрежденную точку встречи оптимален по требованию кинематической перегрузки.
Самонаведение – такой метод управления, при котором на борту ЛА измеряются параметры движения цели и формируются команды управления, обеспечивающие наведение ЛА на цель.
В зависимости от места расположения первичного источника электромагнитного излучения различают активные, полуактивные, пассивные и комбинированные системы самонаведения (ССН).
Координаторы:
- радиолокационные
- тепловые
- оптические
- телевизионные
Основной информацией, используемой в системах СН, является информация о взаимном положении ЛА и цели. Это положение определяется направлением в пространстве линии визирования цели.
Метод стабилизации угловой скорости линии визирования.
Методы СН:
- метод погони
- метод погони с упреждением
- метод параллельного сближения
- метод пропорциональной навигации
- модифицированный метод пропорциональной навигации
Автономное управление – вся информация заранее заносится в бортовую систему управления. Системы, использующие для выработки сигнала управления информацию собственной инерциальной навигационную систему, без использования средств внешней коррекции.
Можно использовать два принципа:
1) можно рассчитать параметры заранее и записать в БАСУ
2) непрерывное определение параметров в полете.
Достоинство – высокая скрытность и помехозащищенность.
Недостаток – низкая точность, сложность построения, высокая стоимость.
Билет №12
1. Построение оптимальной барограммы маневра наборы высоты и скорости полета для ЛА, совершающего полет в атмосфере.
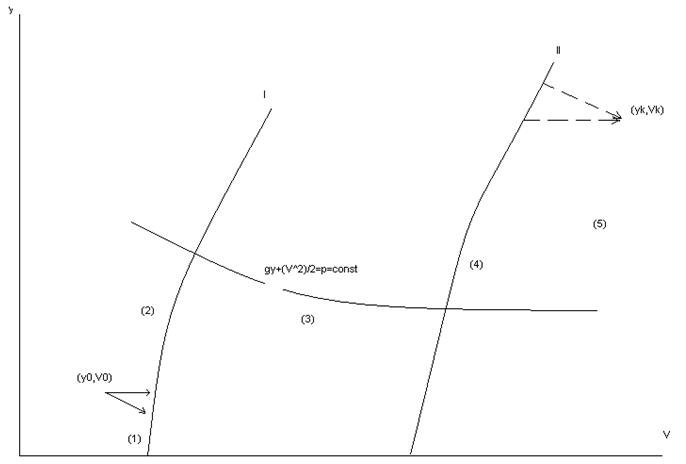
Первый участок (1)- скорейший выход на первую экстремаль ( I ).
При отсутствии запаса по высоте это – разгон до соответствующей скорости по горизонтале. При возможности “перекачки” потенциальной энергии высоты в кинетическую – разгон со снижением; предельный случай - мгновенный переход на экстремаль ( I ) за счет уменьшения высоты полета:
Второй участок (2)- набор высоты с небольшим увеличением скорости, которая остается дозвуковой, по экстремали ( I ).
На участке (3) – скорейший переход на сверхзвуковую экстремаль. Он может быть организован со снижением, в пределах – до
Если на высоте Yk конечная заданная скорость Vk больше, чем скорость, соответствующая экстремали II, может оказаться выгодным использовать такую возможность дальнейшего движения по экстремали II и последующего снижения с разгоном до скоростиVk. Обычно выбор Yk продиктован некоторыми ограничениями, поэтому в точке экстремали II, соответствующей несколько меньшей высоте, активизируется программа плавного перехода на маршевую высоту полета.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.