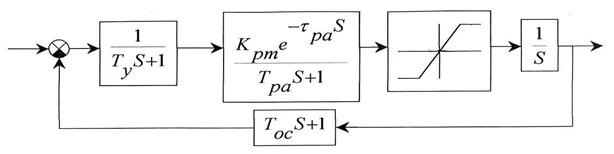
Рулевой привод включает в себя: усилитель рулевого привода, рулевую машинку, цепь обратной связи.
|
|
|
Рис. 4 – Функциональная схема рулевого привода |
Добротность РП – произведение коэффициентов усиления в замкнутом контуре.
|
|
(4.1) |
где  – коэффициент усиления рулевого тракта;
– коэффициент усиления рулевого тракта;
 – коэффициент усиления (передачи) рулевой
машинки;
– коэффициент усиления (передачи) рулевой
машинки;
 – коэффициент усиления в цепи обратной
связи;
– коэффициент усиления в цепи обратной
связи;
Единичная обратная связь в контуре рулевого привода предназначена для обеспечения заданных статических и динамических характеристик рулевого привода, как следящей системы. В замкнутой цепи рулевого привода могут быть использованы различные виды обратной связи (ОС)
«жесткая» (позиционная)
обратная связь – ![]() ;
;
«гибкая» (скоростная)
обратная связь – ![]() ;
;
изодромная обратная связь
–  ;
;
Использование того или иного вида обратной связи, является изолированным вопросом, касающимся только рулевого привода. Напротив, выбранный вид обратной связи зависит часто от общей структуры реализуемого закона управления (стабилизации). Следовательно, вид обратной связи РП и управляющего сигнала на входе РП взаимосвязаны в том смысле, что они определяют общую структуру алгоритма стабилизации.
Для определенного класса
объектов управления было установлено, что требуемое быстродействие переходных
процессов обеспечивается при ![]() .
Быстродействие процессов в РП зависит от суммарного запаздывания:
.
Быстродействие процессов в РП зависит от суммарного запаздывания:
|
|
(4.2) |
Звено транспортного
запаздывания ![]() , может быть аппроксимировано звеном
вида:
, может быть аппроксимировано звеном
вида:
|
|
(1.20) |
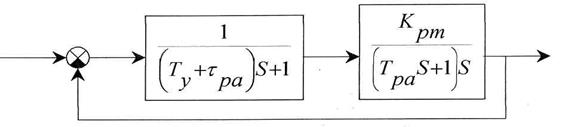
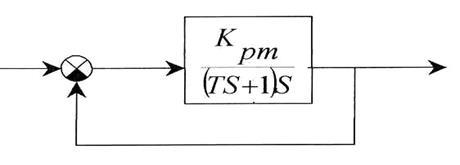
При исследовании динамики систем управления часто используют упрощенные математические модели исполнительных механизмов. Так, математическая модель рулевого привода может быть аппроксимирована следующими более простыми моделями (Рис.5, Рис 6.)
|
|
|
Рис. 4 – математическая модель рулевого привода с гибкой ОС |
|
|
|
Рис. 5– упрощенная модель рулевого привода |
|
|
|
Рис. 6 – упрощенная модель рулевого привода |
Билет №11
1. Особенности ВРД как объектов регулирования и элементов СУ.
Воздушно-реактивный двигатель:
- воздухозаборник
- компрессор
- камера сгорания
- сопловой аппарат
Пульсирующий ВРД – компрессор отсутствует.
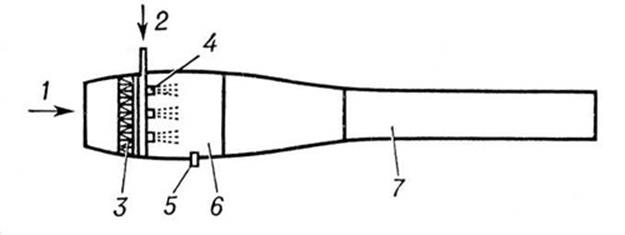
Схема пульсирующего воздушно-реактивного двигателя (ПуВРД): 1 — воздух; 2 — горючее; 3 — клапанная решётка; 4 — форсунки; 5 — свеча; 6 — камера сгорания; 7 — выходное (реактивное) сопло.
Прямоточный ВРД – компрессор и воздухозаборник совмещены.
Недостатки пульсирующего ВРД:
- Моторесурс ограничен стойкостью клапанов
- Дозвуковая скорость
- Низкий КПД из-за сопла
Турбореактивные двигатели:
- высокий КПД
- широкий диапазон скоростей (до М ≈ 3)
- самостоятельный взлет ЛА
- область применения велика
![]()
![]()
![]()




ВЗ – воздухозаборник
ФК – форсажная камера
КС – камера сгорания
Управляемые переменные:
n – частота вращения;
Tз* – температура на лопатках
1% n, Tз* - прирост на 5 – 10% удельной тяги, на 7 – 12% снижения надежности.
Прямоточные двигатели:
Схема прямоточного воздушно-реактивного двигателя (ПВРД): 1 — воздух; 2 — диффузор; 3 — впрыск горючего; 4 — стабилизатор пламени; 5 — камера сгорания; 6 — сопло; 7 — истечение газов.
- нет компрессора и турбины
- работают в условиях первоначального разгона
- М ≈ 7 и выше.
2. Характеристика систем автономного управления, телеуправления и самонаведения.
Теленаведение – способ управления, при котором один из элементов системы управления находится вне ЛА и связан с ним каналом связи.
Телеуправляемые ЛА – это ЛА, управление которыми осуществляется на расстоянии с помощью аппаратуры, расположенной на командном пункте управления.
Системы телеуправления ЛА делятся на 2 группы:
1. командные
2. системы управления по лучу (системы теленаведения)
В командных системах телеуправления сигнал управления формируется на командном пункте управления и по линии связи передается на борт ЛА.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.
 ; (Паде — аппроксимация)
; (Паде — аппроксимация)