Разворот самолета характеризуется тремя процессами: разворотом вектора скорости, изменением угла крена, изменением угла скольжения. Уголь скольжения обычно стремятся сделать равным нулю. Процессы разворота вектора скорости и изменения угла крена взаимосвязаны: чем больше угол крена, тем меньше время разворота. Поскольку величина угла крена на один градус разворота ограничивается прочностными характеристиками ЛА и его оборудования, то возможности уменьшения времени разворота также ограничены.
Картина распределения углов при развороте показана на рисунке.
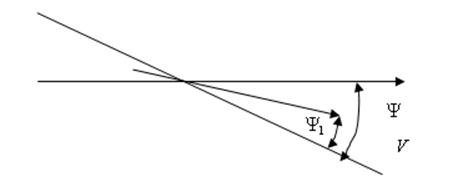
Угол
рыскания ![]() опережает
угол вектора скорости
опережает
угол вектора скорости ![]() . Если скольжение отсутствует, то связь между
углами рыскания и крена:
. Если скольжение отсутствует, то связь между
углами рыскания и крена:
 ,
, ![]() - аэродинамическая постоянная
времени ЛА
- аэродинамическая постоянная
времени ЛА
Угол разворота вектора скорости ![]() пропорционален интегралу от угла крена, т.е.
пропорционален интегралу от угла крена, т.е.
 .
(1)
.
(1)
Таким образом, если указан угол крена ![]() , то угол разворота вектора скорости можно найти
по формуле (1).
, то угол разворота вектора скорости можно найти
по формуле (1).
Билет №9
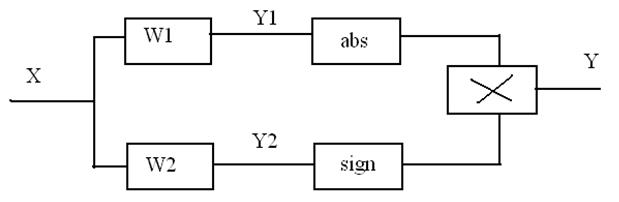
1. Двухканальные псевдолинейные фильтры.
- псевдолинейное звено
![]()
Применение звеньев с неоднородной характеристикой («антилюфт»)
Создает запас устойчивости по фазе.
Мы можем менять и амплитуду, и частоту отдельно
2.Система самонастройки передаточных чисел контура управления ЛА.
- активная
-пассивная
Обозначим кx - произвольный параметр ЛА
кx = кx (Н, V)
Если на борту есть инерциальная навигационная система – система с пассивной самонастройкой. Активная предполагает введение в систему пробных сигналов и их обработку (схему реакции системы, идентификацию ОУ, т.е. уточнение её модели и согласование изменения передаточных чисел).
Можно ОС сделать релейной.
Система с релейным АПП идентична самонастраивающейся, их не применяют, т.к. возможны автоколебания, а они не должны быть на всём протяжении полёта.
Коэффициент определяется из критического условия для различных траекторий, для каждой точки единичной траектории определяется конкретное значение. В момент определения коэффициента, в данной точке принимается все постоянно (то есть например, метод замороженных коэффициентов), определяем закон управления в этот момент.
Но коэффициенты мы не можем менять мгновенно, при переходе из точки в точку они не меняются линейно.
Следовательно, нужно вывести закон, который учитывал бы все эти условия. Это, например, может быть сила, которая воздействует на ЛА (скоростной напор (H и V). Поэтому один из способов изменения коэффициентов – это их аппроксимация в зависимости от H и V.
Билет №10
1. Определение помехоустойчивости нелинейной СУ полетом.
Самое главное здесь рассказать про построение кривой помехоустойчивости
Помехоустойчивость технического устройства (системы), способность устройства (системы) выполнять свои функции при наличии помех. П. оценивают интенсивностью помех, при которых нарушение функций устройства ещё не превышает допустимых пределов. Чем сильнее помеха, при которой устройство остаётся работоспособным, тем выше его П. Многообразие устройств и решаемых ими задач, с одной стороны, и видов помех — с другой приводят к необходимости специализированного подхода при рассмотрении П. в каждом конкретном случае. Требования к П. различных устройств отличаются большим разнообразием: так, в радиолокационных системах иногда считают допустимым пропуск отдельных радиолокационных станцией (за время однократного обзора контролируемой ею области пространства) до половины объектов, подлежащих обнаружению, а в системах передачи данных использующих ЭВМ, часто недопустима потеря даже одного передаваемого знака из чрезвычайно большого их числа.
Если полоса пропускания частот выбирается большой, то все изменения параметров приводят к изменению характеристик высокочастотных колебаний, которые практически не проявляются в регулируемой координате. Формально, чем выше частота высокочастотных колебаний, тем менее они заметны в выходном сигнале и казалось бы полосу пропускания частот системы целесообразно выбирать как можно большей. В действительности любые из рассмотренных систем, во-первых, содержат элементы с нелинейной статической характеристикой (типа насыщение) и, во-вторых, они работают в условиях сравнительно интенсивных высокочастотных помех.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.