При синтезе СУ и алгоритмов управления движением учитываются ошибки измерителей высоты полета над уровнем моря и необходимое превышение высоты над уровнем местности от условий полета. В том числе учитывается зависимость ошибок ИНС от времени, прошедшего с момента последней коррекции от радиовысотомера или системы навигации по спутникам Земли.
Первым этапом синтеза является обоснованный выбор средств измерения высоты и их «комплексирование». Алгоритм обработки измерений должен давать несмещенную эффективную (с минимальной дисперсией) оценку высоты, а также оценку своей возможной ошибки. В зависимости от текущей оценки ошибки производится выбор и уточнение высоты, на которую осуществляется выход из пикирования.
Быстрый ввод в пикирование обеспечивается скачкообразным уменьшением управляющей установки угла тангажа J1 на разность балансировочного (на марше) и минимально допустимого углов атаки с последующей примерно постоянной угловой скоростью выхода на минимальный угол тангажа. Этот угол определяется либо кинематически по запасу высоты, либо ограничениями по разгону (по скоростному напору и температуре торможения набегающего потока).
Для увеличения крутизны пикирования без нарушения ограничений по разгону ЛА применяются:
- глубокое дросселирование двигателя;
- постановка рулей «плугом»;
- выпуск тормозных щитков;
- замена прямолинейного участка пикирования движением «по спирали» или "змейкой".
Момент начала выхода из пикирования определяется кинематически по фактической скорости снижения, запасу высоты и допустимой перегрузке.
Эпюра угла тангажа при минимизации дистанции снижения представлена на рис.
Необходимость сокращения дистанции снижения обычно связана с экономией энергетики средств наблюдения обстановки на борту ЛА. Если включение этих средств не привязывается к маршевому участку полета, появляется возможность синтеза управления на участке ввода в пикирование по критерию экономии горючего (ввод в пикирование по баллистической кривой). Минимизация дистанции маневра в этом случае применяется к участку, непосредственно следующему за моментом включения средств наблюдения.
В целом подходом к синтезу управления на этом участке является наискорейшее достижение и выдерживание очередного ограничения (по минимальному углу атаки, по углу тангажа, по допустимой перегрузке). Применяется также адаптация скорости изменения установки J1 по фактическим измерениям угла атаки и нормальной перегрузки.
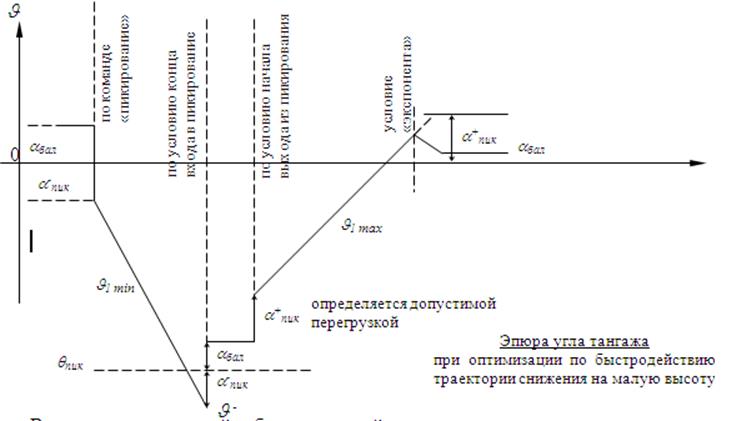
В связи с различающейся балансировкой по углу атаки и рулю высоты на смежных участках выхода из пикирования с максимальной перегрузкой и прямолинейного полета на малой высоте необходим переходный участок, на котором перегрузка экспоненциально спадает от предельной до единичной. Без такого участка практически не обеспечивается выход на малую высоту без «просадки».
Обычно управление на переходном участке реализуют в виде экспоненциальной программы высоты:
|
|
с начальным условием
|
|
где Hмв – конечная уставка малой высоты;
Hн – начальная уставка высоты, совпадающая с текущей высотой полета H;
Tэ – фиксированная заранее постоянная времени экспоненты.
Момент «перехода на экспоненту» фиксируется как момент прохождения некоторой высоты H = Hэ.
Такой
упрощенный способ не обеспечивает согласованности скорости изменения
управляющей программы высоты (вначале всегда получается  , одна и та же величина) и фактической
скорости снижения, которая может иметь некоторый разброс.
, одна и та же величина) и фактической
скорости снижения, которая может иметь некоторый разброс.
Как показала практика, положение не улучшается при формировании управляющей программы с помощью линейного звена второго порядка.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.