Сигналы с чувствительных элементов (ДУ, ДУС, ДУУ, ДП), пропорциональные параметрам движения ЛА, преобразуются и суммируются в вычислительном устройстве (ВУ), затем усиливаются в усилителе мощности (У) и поступают в качестве командного сигнала на рулевую машинку (РМ), которая отклоняет орган управления ЛА (руль). Обратная связь с выхода рулевой машинки на вход вычислительного устройства применяется в АП для получения желаемого закона управления и улучшения динамических характеристик привода (рулевой машинки). Механизм согласования (МС) служит для автоматической подготовки АП к включению его силовой части.
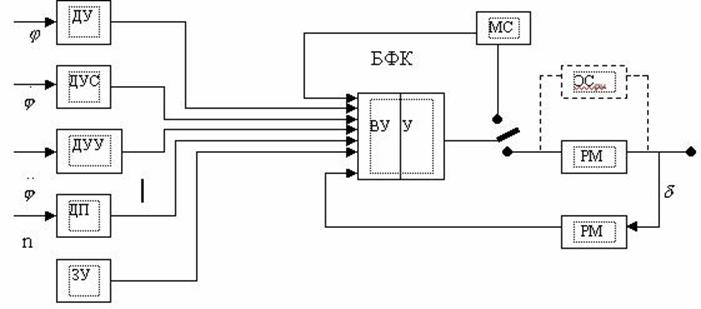
Рис. Типовая функциональная схема АП: ДУ – датчик угла; ДУС – датчик угловой скорости; ДУУ – датчик углового ускорения; ДП – датчик перегрузок (датчик линейного ускорения); ЗУ – задающее устройство (задатчик); БФК – блок формирования команд; ВУ – вычислительное устройство; У – усилитель; МС – механизм согласования; РМ – рулевая машинка; ОС – устройство обратной связи; ОСрм – устройство обратной связи рулевой машинки.
Задающее
устройство (ЗУ) служит для введения в АП заданного значения регулируемого
параметра ![]() . В
качестве ЗУ могут быть использованы ручка задатчика на пульте АП, программный
механизм или блок связи с системой наведения.
. В
качестве ЗУ могут быть использованы ручка задатчика на пульте АП, программный
механизм или блок связи с системой наведения.
В АП могут отсутствовать такие элементы, как ДУС, ДУУ, ДП, МС; обратная связь может охватывать только РМ.
Системы стабилизации беспилотных ЛА по принципу действия не отличаются от самолетных АП, хотя в конструктивном отношении они более просты.
Каналы стабилизации рыскания и тангажа осимметричных объектов по своей схеме не отличаются друг от друга. Все три канала стабилизации таких ЛА обычно независимы и построены по прямой схеме.
В современных ЛА для улучшения качества процесса управления между отдельными каналами АП существуют перекрестные связи. Говорят, что АП построен по перекрестной схеме. С помощью этих связей сигнал, пропорциональный углу рыскания, подается на привод элеронов, а сигнал, пропорциональный углу крена, - на приводы руля высоты и руля направления. В этом случае принято называть отдельные каналы АП не по виду регулируемого параметра, а по виду органа управления, обслуживаемого данным каналом. Таким образом, вместо канала крена называют канал элеронов, вместо канала рыскания – канал руля направления.
В качестве электрического рулевого привода может быть использован обычный электрический двигатель, реверсивный по цепи якоря. Это электрический двигатель непостоянного вращения. Также может быть использован двигатель постоянного вращения с подключением руля через муфты.
Приведем электрокинематическую схему такого привода:

ЭММ — электромеханическая муфта.
I — управляющий ток в обмотках муфты.
Когда поступает управляющий сигнал, муфта притягивает шестеренку передавая вращение на руль. Вращение руля происходит в обратную сторону.
Когда не требуются большие крутящие моменты, используются электрические рулевые машинки.
Стремятся сделать систему с ШИМ. Тогда система по мгновенному сигналу ведет себя как релейная, а по среднему сигналу как линейная.
Исследование динамики рулевого привода.
Из всех элементов системы угловой стабилизации (СУС), наибольшей инерционностью обладает рулевой привод (РП), что позволяет в качестве инерционности системы стабилизации рассматривать инерционность рулевого привода.
Рулевой привод – следящая система с жесткой обратной связью
Основным исполнительным элементом рулевого привода является рулевая машинка. Рулевые машинки бывают нескольких типов:
- Электрическая (электродвигатель);
- Электропневматическая;
- Электрогидравлическая;
В системах управления ЛА чаще всего используются электрогидравлические рулевые машинки, связано это, прежде всего, с необходимостью развивать большие крутящие моменты и требованиями по быстродействию. Типовая схема электрогидравлического рулевого привода представлена на рисунке 3.
|
|
|
Рис. 3 – Схема электрогидравлического рулевого привода |
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.