




















































Предмет ТАУ
Теория Автоматического Управления (ТАУ) - математическая теория информационных процессов передачи и преобразования сигналов в так называемых автоматических системах.
Теория автоматического управления (ТАУ) появилась во второй половине 19 века сначала как теория регулирования. Широкое применение паровых машин вызвало потребность в регуляторах, то есть в специальных устройствах, поддерживающих устойчивый режим работы паровой машины. Это дало начало научным исследованиям в области управления техническими объектами. Оказалось, что результаты и выводы данной теории могут быть применимы к управлению объектами различной природы с различными принципами действия. В настоящее время сфера ее влияния расширилась на анализ динамики таких систем, как экономические, социальные и т.п. Поэтому прежнее название “Теория автоматического регулирования” заменено на более широкое - “Теория автоматического управления”.
Автоматическая система - технический комплекс аппаратных и программных средств, предназначенный для целенаправленного изменения координат объекта управления помимо воли человека.
Комплекс – набор звеньев, соединенных между собой.
Целенаправленность – наличие оценок качества управления; эти оценки задаются целевой функцией.
Координаты – сигналы, однозначно характеризущие положение объекта управления в пространстве состояния.
Иными словами автоматическая система – система, работающая без участия человека.
Ручная система – система, полностью управляемая человеком
Автоматизированные системы-системы, использующие интеллект человека (автоматическая система с частичным участием человека).
Сигнал - количественная оценка физического явления, используемого для передачи информации.
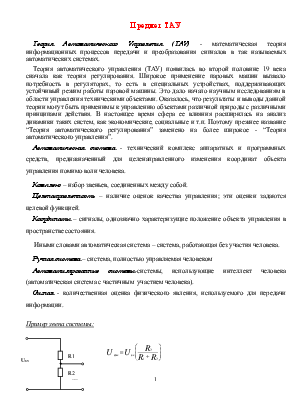
Пример звена системы:
![]()
К-коэффициент передачи
![]()
![]()
Задачи курса
1.Задача анализа автоматических систем включает в себя:
1. описание свойств системы, построение математической модели (формализованное описание объекта), пригодной для оценки поведения при стандартных входных сигналах, а также для постановки задачи синтеза для регуляторов;
2. оценку устойчивости автоматической системы;
3. оценку качества системы - система должна отрабатывать воздействие с регламентируемыми показателями качества.
2. Синтез автоматических систем представляет собой разработку систем автоматического управления с наилучшими показателями качества, т.е. задачу оптимального синтеза структуры и параметров систем автоматического управления. При решении задачи могут рассматриваться следующие подзадачи:
· Коррекция свойств объекта управления
· Разработка, проектирование и конструктивный расчет регуляторов автоматических систем.
Язык курса
 Элемент автоматической системы (звено) - функционально законченное
устройство, имеющее набор входных x(t) и выходных y(t) сигналов и
рассматриваемое как единое целое.
Элемент автоматической системы (звено) - функционально законченное
устройство, имеющее набор входных x(t) и выходных y(t) сигналов и
рассматриваемое как единое целое.
Элементы и звенья системы обладают свойством детектирования:
Y(t) зависит от X(t)
X(t) не зависит от Y(t)
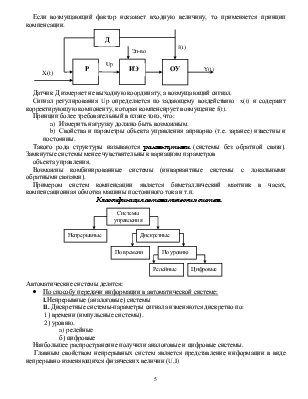
Функциональная схема - схема, показывающая состав системы, функциональное назначение отдельных элементов, направления распространения сигналов между элементами.
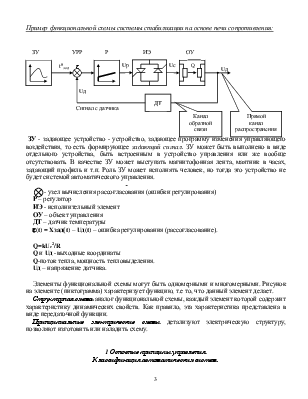
Пример функциональной схемы системы стабилизации на основе печи сопротивления:
 |
|||
ЗУ - задающее устройство - устройство, задающее программу изменения управляющего воздействия, то есть формирующее задающий сигнал. ЗУ может быть выполнено в виде отдельного устройства, быть встроенным в устройство управления или же вообще отсутствовать. В качестве ЗУ может выступать магнитофонная лента, маятник в часах, задающий профиль и т.п. Роль ЗУ может исполнять человек, но тогда это устройство не будет системой автоматического управления.
![]()
![]() - узел вычисления рассогласования (ошибки регулирования)
- узел вычисления рассогласования (ошибки регулирования)
Р – регулятор
ИЭ - исполнительный элемент
ОУ – объект управления
ДТ – датчик температуры
e(t) = Xзад(t) – Uд(t) – ошибка регулирования (рассогласование).
Q=kUc2/R
Q и Uд -выходные координаты
Q-поток тепла, мощность тепловыделения.
Uд – напряжение датчика.
Элементы функциональной схемы могут быть одномерными и многомерными. Рисунок на элементе (пиктограмма) характеризует функцию, т.е то, что данный элемент делает.
Структурная схема-аналог функциональной схемы, каждый элемент которой содержит характеристику динамических свойств. Как правило, эта характеристика представлена в виде передаточной функции.
Принципиальные электрические схемы детализуют электрическую структуру, позволяют изготовить или наладить схему.
1 Основные принципы управления.
Классификация автоматических систем.
Управление - воздействие на объект управления с целью обеспечения заданного режима его работы и достижения определенного результата его работы.
Регулирование - частный случай управления, целью которого является обеспечение близости выходного сигнала к заданным внешним сигналом значениям.
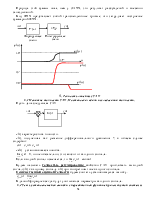
Принципы построения систем автоматического управления
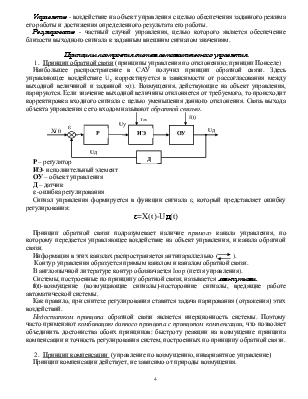
1. Принцип обратной связи (принципы управления по отклонению; принцип Понселе)
Наибольшее распространение в САУ получил принцип обратной связи. Здесь управляющее воздействие Uy корректируется в зависимости от рассогласования между выходной величиной и заданной x(t). Возмущения, действующие на объект управления, парируются. Если значение выходной величины отклоняется от требуемого, то происходит корректировка входного сигнала с целью уменьшения данного отклонения. Связь выхода объекта управления с его входом называют обратной связью.
 |
Р – регулятор
ИЭ- исполнительный элемент
ОУ – объект управления
Д – датчик
ε -ошибка регулирования
Сигнал управления формируется в функции сигнала ε, который представляет ошибку регулирования:
ε=X(t)-Uд(t)
Принцип обратной связи подразумевает наличие прямого канала управления, по которому передается управляющее воздействие на объект управления, и канала обратной связи.
![]()
![]() Информация в этих каналах распространяется
антипараллельно ( ).
Информация в этих каналах распространяется
антипараллельно ( ).
Контур управления образуется прямым каналом и каналом обратной связи.
В англоязычной литературе контур обозначается loop (петля управления).
Системы, построенные по принципу обратной связи, называется замкнутыми.
f(t)-возмущение (возмущающие сигналы)-посторонние сигналы, вредящие работе автоматической системы.
Как правило, при синтезе регулирования ставится задача парирования (отражения) этих воздействий.
Недостатком принципа обратной связи является инерционность системы. Поэтому часто применяют комбинацию данного принципа с принципом компенсации, что позволяет объединить достоинства обоих принципов: быстроту реакции на возмущение принципа компенсации и точность регулирования систем, построенных по принципу обратной связи.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.