2. Принцип компенсации (управление по возмущению, инвариантное управление)
Принцип компенсации действует, не зависимо от природы возмущения.
Если возмущающий фактор искажает входную величину, то применяется принцип компенсации.
 |
|||
|
|
|
|


|
|
|
|
Датчик Д измеряет не выходную координату, а возмущающий сигнал.
Сигнал регулирования Uр определяется по задающему воздействию x(t) и содержит корректирующую компоненту, которая компенсирует возмущение f(t).
Принцип более требовательный в плане того, что:
a) Измерить нагрузку должно быть возможным.
b) Свойства и параметры объекта управления априорно (т.е. заранее) известны и постоянны.
Такого рода структуры называются разомкнутыми (системы без обратной связи). Замкнутые системы менее чувствительны к вариациям параметров
объекта управления.
Возможны комбинированные системы (инвариантные системы с локальными обратными связями).
Примером систем компенсации является биметаллический маятник в часах, компенсационная обмотка машины постоянного тока и т.п.
Классификация автоматических систем.
 |
Автоматические системы делятся:
· По способу передачи информации в автоматической системе:
I.Непрерывные (аналоговые) системы
II. Дискретные системы-параметры сигнала изменяются дискретно по:
1) времени (импульсные системы).
2) уровню.
a) релейные
б) цифровые
Наибольшее распространение получили аналоговые и цифровые системы.
Главным свойством непрерывных систем является представление информации в виде непрерывно изменяющихся физических величин (U,I)
 Непрерывность-между любыми двумя моментами времени t1 и t2 содержится
сколь угодно много значений сигнала:
Непрерывность-между любыми двумя моментами времени t1 и t2 содержится
сколь угодно много значений сигнала:
txЄ(t1,t2)
y(tx)- существует
Главной особенностью систем является то, что они дискретны по времени
txЄ(T,2T,…,nT)
y*[nT]- существует
а для промежуточных значений y(nT) нет - это описание называется решетчатой функцией.
1.2 Историческая справка
Джеймс Уатт (1736-1819), английский изобретатель, создатель универсального теплового двигателя. В 1769 году Уатт провозгласил открытие новой эпохи – эпохи пара. Он представил миру (1774-1784) первую паровую машину с цилиндром двойного действия, в которой применил центробежный регулятор, передачу от штока цилиндра к балансиру с параллелограммом и др. (патент 1784). Основной особенностью было разделение циклов нагревания и охлаждения, что позволило сократить потери энергии и уменьшить расход топлива. Первая машина Уатта явилась первым универсальным промышленным двигателем, нашедшим свое практическое применение, и сыграла исключительно важную роль при переходе промышленности от ручного труда к машинному производству.
|
|
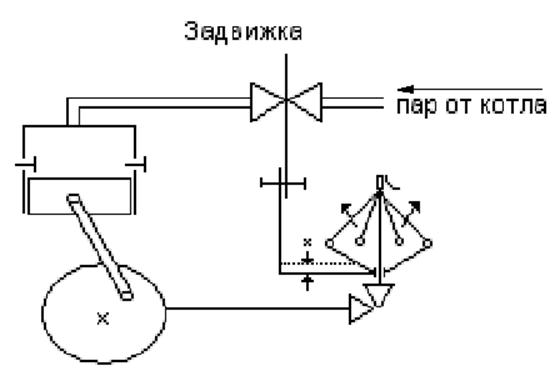
Двигатель стоит: грузики внизу, заслонка открыта.
Машина интенсивно разгоняется. По мере разгона скорость ω растет, угол раздвижения φ увеличивается, х увеличивается и заслонка постепенно закрывается. Это происходило из-за инерционности отдельных звеньев системы, что приводило к запаздыванию сигнала.
Установление равновесия возможно по двум вариантам:
|
|
|
|
|
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.