|
П |
еред разработчиком системы управления всегда стоит задача формирования в ней наилучших в каком-либо смысле переходных процессов. Чаще всего возникает необходимость обеспечения максимального быстродействия исполнительных механизмов или минимальных затрат энергии на совершение переходных процессов. При этом, естественно, ограничены какие-то внутренние переменные объекта или оговорены дополнительные условия работы. Например, при оптимизации быстродействия системы ограничены, как правило, управляющие воздействия; при оптимизации затрат энергии ограничена длительность переходных процессов. Таким образом, искусство инженера-проектировщика состоит в максимальном удовлетворении заданных требований при известных ресурсных ограничениях.
С развитием техники и теории автоматического управления предъявляемые к системам требования становились все более жесткими, что привело к разработке соответствующих способов проектирования. В 50-х годах XX в. появились математические методы оптимизации переходных процессов: метод динамического программирования Р. Беллмана [1] и принцип максимума Л.С. Понтрягина [10], которые и будут представлены в данном разделе. Ниже рассмотрены основы этих методов и методики проектирования автоматических систем с их применением.
12.1. Основные понятия
Оптимальной называют такую систему автоматического управления, в которой полностью в каком-либо формальном смысле используются динамические возможности объекта для совершения переходных процессов при заданных ресурсных ограничениях.
Управление,
обеспечивающее в системе оптимальные процессы, называется оптимальным
и обозначается далее ![]() .
.
Покажем особенности задачи синтеза оптимальной системы на следующем примере.
Пример 12.1
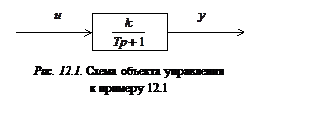 |
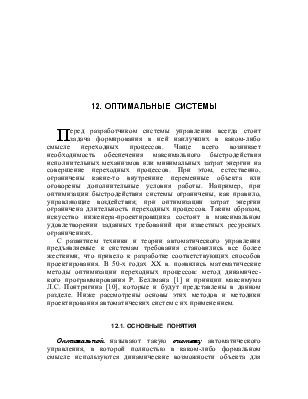
Рассмотрим переходные процессы при подаче на вход объекта различных управляющих воздействий (рис. 12.2):
 |
2) при подаче на объект
максимально возможного управления ![]() на его выходе получим
процесс, соответствующий кривой 2, причем в момент времени
на его выходе получим
процесс, соответствующий кривой 2, причем в момент времени ![]() значение выходной переменной будет
равно
значение выходной переменной будет
равно ![]() ;
;
3) если сначала подать
максимально возможное управление ![]() а в момент времени
а в момент времени ![]() сформировать u =
сформировать u = ![]() , то процесс перехода
в требуемое состояние будет заканчиваться за минимально возможное для объекта
время при заданном ограничении на управление.
, то процесс перехода
в требуемое состояние будет заканчиваться за минимально возможное для объекта
время при заданном ограничении на управление.
Реализовать на практике описанный алгоритм управления можно двумя способами:
1. В виде программного закона управления
В этом случае оптимальная система будет разомкнутой и, следовательно, не позволит обеспечить требуемые свойства при действии на объект внешних возмущений.
2. Закон управления в виде обратной связи
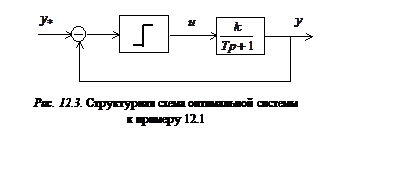 |
Обращаем внимание на то, что полученная релейная система обеспечит оптимизацию переходных процессов при любых параметрах объекта и даже при действии возмущений. Это тот редкий в технике случай, когда алгоритм оптимального управления инвариантен по отношению к возмущениям и нестационарности параметров объекта.
Рассмотренный пример иллюстрирует основные свойства оптимальных
систем: объект работает на пределе своих возможностей (полное использование
ресурса ![]() ), управление имеет релейный характер.
), управление имеет релейный характер.
12.2. Постановка задачи синтеза оптимальных систем
12.2.1. Описание объекта управления
Постановка задачи синтеза оптимальных систем предполагает строгую формализацию всех этапов [1 – 3, 5, 10], начиная с описания объекта управления, которое следует представить в переменных состояния. Причем объект должен быть стационарным (параметры не могут изменяться с течением времени), т. е. в общем случае его модель имеет вид
![]() . (12.1)
. (12.1)
Здесь ![]() – вектор состояния объекта;
– вектор состояния объекта; ![]() – вектор нелинейных функций,
удовлетворяющих условию существования и единственности решения
дифференциального уравнения.
– вектор нелинейных функций,
удовлетворяющих условию существования и единственности решения
дифференциального уравнения.
В частном случае объект может быть описан нелинейным стационарным уравнением состояния с аддитивным управлением
![]() , (12.2)
, (12.2)
где ![]() – матрица нелинейных функций.
– матрица нелинейных функций.
В классе объектов с аддитивным управлением можно выделить подкласс линейных объектов, модель которых имеет вид
![]() . (12.3)
. (12.3)
Здесь A и B – матрицы коэффициентов соответствующих размерностей.
12.2.2. Описание начальных и конечных состояний
На этапе постановки задачи синтеза следует оговорить множество начальных условий объекта и множество конечных состояний, в которые его требуется перевести. Подобный переход удобнее рассматривать в пространстве состояний, причем в зависимости от вида области начальных и конечных состояний можно выделить четыре типа задач синтеза (рис. 12.4.).
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.