При ограниченном ресурсе (например, ![]() ) вычисленное с помощью (12.35) оптимальное
управляющее воздействие может находиться вне области допустимых значений,
поэтому для отыскания максимума гамильтониана необходимо использовать максимальное
значение управления
) вычисленное с помощью (12.35) оптимальное
управляющее воздействие может находиться вне области допустимых значений,
поэтому для отыскания максимума гамильтониана необходимо использовать максимальное
значение управления ![]() .
.
12.4.2. Процедура определения оптимального управления
На основе рассмотренных соотношений принципа максимума Л.С. Понтрягина можно предложить следующую процедуру расчета регулятора.
1. Описание объекта следует привести к стандартному для теории оптимального управления виду (12.1):
![]() .
.
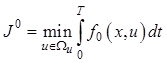
Записывается критерий оптимальности (12.4) в форме
 .
.
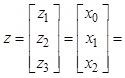
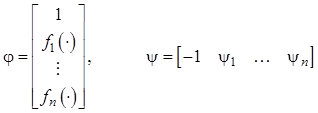
2. Формируется расширенный вектор
состояния ![]() и правых частей
и правых частей![]() в общем
виде записывается вектор сопряженных координат
в общем
виде записывается вектор сопряженных координат
![]() .
.
3. В форме скалярного произведения
векторов ![]() и
и ![]() записывается
гамильтониан
записывается
гамильтониан
![]() .
.
4. Из условия максимума гамильтониана определяется оптимальное управление как функция сопряженных координат
![]() .
.
5. Формируется система дифференциальных уравнений для нахождения сопряженных координат
 .
.
6. Вычисляется оптимальное управление в виде функции времени (программное управление)
![]() .
.
7. По возможности осуществляется переход к оптимальному управлению в виде обратной связи
![]() .
.
Рассмотрим вычисление оптимального управления с помощью описанной процедуры на примере.
Пример 12.3
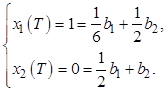
Определить оптимальное управление для объекта, поведение которого описывают уравнения

Требуется обеспечить переход из начальной точки в конечную
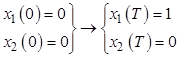 , за
заданное время
, за
заданное время ![]() с при минимуме затрат энергии, т.
е.
с при минимуме затрат энергии, т.
е.
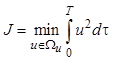 .
.
Поскольку известно описание объекта в переменных состояния, переходим к формированию расширенного вектора состояния и правых частей, а также запишем вектор сопряженных координат
 ,
,  ,
,
![]() .
.
Сформируем теперь гамильтониан
![]()
и определим его максимум по u
 .
.
Из этого уравнения определим оптимальное управление в виде функции сопряженных координат
 .
.
Для сопряженных координат запишем систему дифференциальных уравнений
 из которой определим
из которой определим
В результате оптимальное управление принимает вид
 .
.
Коэффициенты
![]() определим, решая краевую задачу. С этой
целью запишем уравнения замкнутой системы
определим, решая краевую задачу. С этой
целью запишем уравнения замкнутой системы
Определим решение для переменных состояния в виде
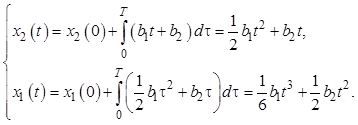
Учтем теперь заданные начальные и конечные условия и T = 1 с.
Решая
полученную систему уравнений, определим неизвестные коэффициенты: ![]() . В результате оптимальный программный
закон управления имеет вид
. В результате оптимальный программный
закон управления имеет вид
![]() .
.
12.4.3. Задача оптимального быстродействия
Задача оптимального быстродействия имеет некоторые особенности, которые упрощают ее решение на основе принципа максимума Л.С. Понтрягина [1, 2].
![]()
с ограниченным
управлением (![]() ) и критерием оптимальности в виде (12.6),
т. е. критерием быстродействия
) и критерием оптимальности в виде (12.6),
т. е. критерием быстродействия
 .
.
Согласно процедуре синтеза на основе принципа максимума запишем расширенный вектор правых частей и вектор сопряженных координат
 , а затем сформируем гамильтониан в виде
, а затем сформируем гамильтониан в виде
![]() . (12.36)
. (12.36)
В соответствии с (12.33) максимум гамильтониана равен нулю. Поскольку первое слагаемое в данном выражении не зависит от управления, можно вместо (12.35) рассматривать усеченный гамильтониан, который называется гамильтонианом быстро-действия
![]() . (12.37)
. (12.37)
В этом случае уравнение принципа максимума принимает вид
![]() . (12.38)
. (12.38)
Таким образом, при решении задачи оптимального быстродействия нет необходимости переходить к расширенному вектору состояния и расширенному вектору правых частей. Можно сформировать гамильтониан быстродействия и определить управление, обеспечивающее его максимум в соответствии с (12.38).
![]() , ограниченным
ресурсом управления
, ограниченным
ресурсом управления ![]() и требованием в виде критерия
быстродействия управляющее воздействие имеет разрывной характер.
и требованием в виде критерия
быстродействия управляющее воздействие имеет разрывной характер.
Сформируем гамильтониан быстродействия (12.37)
![]() , (12.39)
, (12.39)
где ![]() – i-й
элемент вектора
– i-й
элемент вектора ![]() , а
, а ![]() – i-я
строка матрицы
– i-я
строка матрицы ![]() , i
= 1,2,…,n.
, i
= 1,2,…,n.
Управление, обеспечивающее максимум гамильтониана (12.39) с учетом ограничений, имеет вид
![]() . (12.40)
. (12.40)
Следовательно, для объектов класса (12.2) оптимальное управление всегда носит релейный характер.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.