управление ![]() . Однако более часто применяют оптимальное
управление в виде обратной связи
. Однако более часто применяют оптимальное
управление в виде обратной связи ![]() .
.
Задача синтеза оптимальной системы формулируется следующим образом. Для объекта, описанного в переменных состояния с заданными ограничениями на управление и состояние, необходимо определить такой закон управления, который обеспечивал бы переход системы из начального состояния в конечное в соответствии с определенным критерием оптимальности.
12.3. Метод динамического программирования
Метод динамического программирования, предложенный в начале 50-х годов Р. Беллманом [1, 2, 12, 14], используется для синтеза оптимальных систем управления. Он базируется на вариационном исчислении, при выводе его основных соотношений используется принцип оптимальности.
12.3.1. Принцип оптимальности
 Формулировка
принципа оптимальности следующая: конечный участок оптимальной траектории есть
также оптимальная траектория. Доказательство этого принципа можно найти в [1],
здесь ограничимся лишь его пояснением.
Формулировка
принципа оптимальности следующая: конечный участок оптимальной траектории есть
также оптимальная траектория. Доказательство этого принципа можно найти в [1],
здесь ограничимся лишь его пояснением.
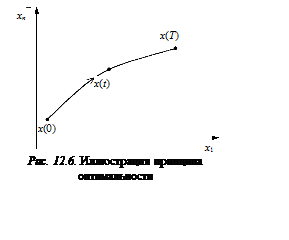
Предположим, что существует единственная оптимальная траектория перехода из точки x(0) в точку x(T) (рис. 12.6). Промежуточная точка x(t) разбивает эту траекторию на две части. Причем ее конечный участок представляет собой оптимальную траекторию, иначе можно было бы найти новую оптимальную траекторию перехода из точки x(t) в точку x(T) и организовать движение из начальной точки x(0) в конечную x(T) по новой оптимальной траектории. Это невозможно, так как для системы существует лишь одна оптимальная траектория перехода из одной точки в другую.
12.3.2. Основные соотношения метода динамического программирования
Будем рассматривать общий класс объектов управления, который описывается уравнением (12.1)
Полагаем, что
переменные состояния ![]() и ресурс управления
и ресурс управления ![]() ограничены.
ограничены.
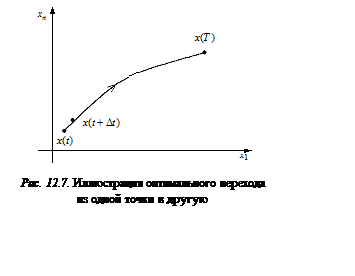
Необходимо определить управляющее воздействие, которое обеспечивало бы переход из начального состояния x(t) в конечное x(T) за время T (рис. 12.7) в соответствии с критерием оптимальности
 . (12.12)
. (12.12)
 |
 (12.13)
(12.13)
или после преобразований
 . (12.14)
. (12.14)
Рассматривая второй интеграл выражения (12.14) как функцию нижнего предела, обозначим его
 . (12.15)
. (12.15)
С учетом (12.15) соотношение (12.14) представим в виде
 . (12.16)
. (12.16)
Полагая промежуток времени Dt достаточно малым, сделаем в (12.16) следующие упрощения:
1) интеграл приближенно заменим произведением
 ; (12.17)
; (12.17)
2) функцию ![]() разложим
в ряд Тейлора в окрестности заданной начальной точки
разложим
в ряд Тейлора в окрестности заданной начальной точки
 , (12.18)
, (12.18)
где R – остаточные члены ряда разложения, которыми можно пренебречь.
Учитывая приближенные замены (12.17) и (12.18), преобразуем выражение (12.16):
 . (12.19)
. (12.19)
Представим ![]() в равенстве (12.19) в
виде суммы двух составляющих следующим образом:
в равенстве (12.19) в
виде суммы двух составляющих следующим образом:
 . (12.20)
. (12.20)
Обсудим получившееся выражение. Согласно введенному обозначению (12.15) здесь
![]() , (12.21)
, (12.21)
поэтому вместо (12.20) получим
 . (12.22)
. (12.22)
Поделим обе части равенства (12.22) на Dt
 , а затем устремим Dt ® 0 и получим
следующее уравнение:
, а затем устремим Dt ® 0 и получим
следующее уравнение:
 . (12.23)
. (12.23)
Поскольку рассматривается оптимальная
траектория движения для объекта (12.1), подставим в (12.23) вместо ![]() правую часть уравнения объекта и получим
основное уравнение метода динамического программирования в виде
правую часть уравнения объекта и получим
основное уравнение метода динамического программирования в виде
 . (12.24)
. (12.24)
Таким образом, оптимальным будет
управление, которое минимизирует выражение (12.24). Однако использовать его для
вычисления ![]() нельзя, так как одно уравнение
(12.24) содержит m+1 неизвестную величину (
нельзя, так как одно уравнение
(12.24) содержит m+1 неизвестную величину (![]() и
и ![]() ).
).
12.3.3. Расчетные соотношения метода динамического программирования
В случае оптимального управления ![]() соотношение (12.24) принимает вид
соотношение (12.24) принимает вид
 . (12.25)
. (12.25)
Продифференцируем (12.25) по ![]() вдоль оптимальной траектории
вдоль оптимальной траектории
 . (12.26)
. (12.26)
Добавив уравнения (12.26) к (12.25), получим систему из m+1 уравнения с m+1 неизвестным, решая которую можно найти оптимальное управление.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.