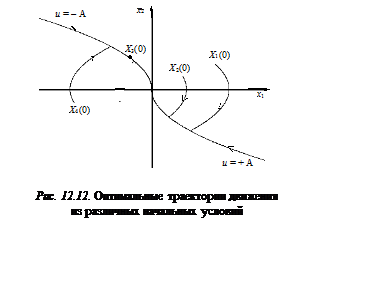
Оптимальный закон управления следующий:
![]() .
.
Теперь изменим направление движений на противоположное, т. е. вернемся к обычному времени (рис. 12.12).
 |
12.6. Субоптимальные системы
Субоптимальными будем называть системы, которые близки по свойствам к оптимальным с заданной точностью. Точность приближения к оптимальной системе определяется соотношением
 , (12.49)
, (12.49)
где ![]() – критерий, соответствующий субоптимальной
системе.
– критерий, соответствующий субоптимальной
системе.
Такую систему получают в результате либо аппроксимации оптимального закона управления, либо искусственного ограничения рабочей области пространства состояний.
Рассмотрим оптимальный закон управления
![]() .
.
Поверхность переключения сложной конфигурации можно аппроксимировать, например, следующим образом:
![]() , (12.50)
, (12.50)
представить в виде совокупности функций
![]() (12.51)
(12.51)
или аппроксимировать каким-либо другим способом. При этом будут получаться субоптимальные системы, с различной степенью точности близкие к оптимальным.
Обсудим особенности субоптимальных систем на примере.
Пример 12.6
Рассмотрим оптимальную по быстродействию систему (см. пример 12.5) и аппроксимируем линию переключения прямой (рис. 12.13).
Уравнение реальной линии переключения имеет вид
![]() .
.
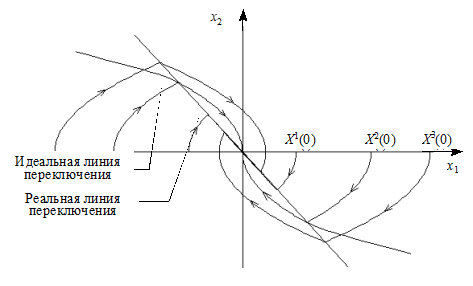
Рис. 12.13. Фазовый портрет субоптимальной системы к примеру 12.6
Процессы в субоптимальной
системе будут существенно зависеть от начальных условий. Так, при движении из X1(0) изображающая точка системы попадает на реальную
линию переключений ![]() , а затем движется вдоль нее в
скользящем режиме.
, а затем движется вдоль нее в
скользящем режиме.
Из начальных условий X 2(0) изображающая точка системы будет попадать в точку пересечения идеальной и реальной линий переключения и к началу координат будет двигаться по соответствующему участку идеальной линии переключений, т. е. по оптимальной траектории.
При движении из X 3(0) изображающая точка системы будет доходить до ![]() , переключаться на траекторию,
соответствующую другому знаку управления, вновь попадать на реальную линию переключений
и двигаться вдоль нее в скользящем режиме.
, переключаться на траекторию,
соответствующую другому знаку управления, вновь попадать на реальную линию переключений
и двигаться вдоль нее в скользящем режиме.
Таким образом, в субоптимальной системе могут быть строго оптимальные процессы, только если из начальных условий изображающая точка системы по фазовой траектории попадает в точку пересечения идеальной и реальной линий переключения.
заключение
С появлением рассмотренных методов оптимизации переходных процессов в теории автоматического управления возник ряд инженерных методов проектирования. Особенно распространенными стали релейные системы оптимизации по быстродействию. В начале раздела рассмотрен случай системы первого порядка, когда алгоритм оптимального управления практически не зависит от параметров объекта и возмущения. К сожалению, этот случай крайне редкий; в подавляющем большинстве система автоматики должна парировать действие возмущений, и вид оптимальных процессов, а следовательно, и алгоритм управления зависят от возмущений. При этом характер изменения самих возмущений во времени неизвестен. Это обстоятельство резко снизило интерес инженеров к математическим методам оптимального управления.
Есть однако несколько конкретных технических ситуаций, когда возможности математической теории оптимального управления могут использоваться в полной мере. Показательным примером может служить задача автоматического управления лифтами и подъемниками. При этом параметры объекта (масса груза) меняются от процесса к процессу, а ограниченным является только значение старшей производной от положения (выходной величины). Старшей производной является ускорение кабины лифта или какая-либо его производная. В пассажирских подъемниках они должны быть ограничены условиями комфорта пассажиров, а в грузовых – условиями прочности конструкции (ограничен должен быть рывок).
В целом теория оптимальных систем автоматики уже вошла в классику автоматического управления, и для нее существует сфера применения, хотя и не такая большая, как казалось вначале.
задачи
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.