![]() , (12.47)
, (12.47)
где ![]() – «усеченный» вектор состояния (без
последней компоненты).
– «усеченный» вектор состояния (без
последней компоненты).
С учетом (12.47) оптимальный закон управления (12.43) можно записать в виде
![]() . (12.48)
. (12.48)
Таким образом, метод поверхности
переключения позволяет получить оптимальный закон управления в виде обратной
связи. Однако при этом приходится рассматривать две совокупности начальных
условий: для переменных состояния ![]() и сопряженных координат
и сопряженных координат
![]() , что существенно затрудняет определение
управляющего воздействия.
, что существенно затрудняет определение
управляющего воздействия.
Отметим также, что метод поверхности переключений можно применять для решения задачи оптимального быстродействия при наличии объектов с аддитивным управлением, поскольку в этом случае оптимальное управление всегда будет иметь релейный характер (12.40).
12.5.2. Метод обратного времени
С целью упрощения задачи определения
поверхности переключения предлагается поменять местами начальную ![]() и конечную
и конечную ![]() точки,
что в пространстве состояний соответствует движению в обратную сторону. Для
динамической системы это означает замену времени t
на –t . При этом вместо двух совокупностей
начальных условий
точки,
что в пространстве состояний соответствует движению в обратную сторону. Для
динамической системы это означает замену времени t
на –t . При этом вместо двух совокупностей
начальных условий ![]() нужно рассматривать только
одну –
нужно рассматривать только
одну – ![]() , так как
, так как ![]() .
.
Постановка задачи синтеза оптимальной системы в обратном времени формулируется следующим образом. Для объекта
![]()
с ограниченным
ресурсом управления необходимо определить оптимальное управление в виде
обратной связи, которое обеспечивает переход из начальной точки ![]() в конечную
в конечную ![]() в соответствии
с критерием оптимальности (12.4). При этом заранее известно, что оптимальное
управление имеет релейный характер.
в соответствии
с критерием оптимальности (12.4). При этом заранее известно, что оптимальное
управление имеет релейный характер.
Отметим, что в этом случае
необходимо перебирать только одну совокупность начальных условий ![]() . Причем каждому конкретному значению
. Причем каждому конкретному значению ![]() соответствует оптимальная траектория
перехода из заданной начальной точки
соответствует оптимальная траектория
перехода из заданной начальной точки ![]() в некоторую конечную
в некоторую конечную ![]() . В соответствии с методом поверхности
переключений в пространстве состояний на траекториях перехода выделяются точки,
где происходит смена знака управления и объединяются в поверхность
. В соответствии с методом поверхности
переключений в пространстве состояний на траекториях перехода выделяются точки,
где происходит смена знака управления и объединяются в поверхность ![]() .
.
В обычном времени следует изменить направление движения на противоположное. В результате находится оптимальное управление в виде (12.43)
![]()
или в форме (12.48).
Пример 12.5
Рассмотрим процедуру определения оптимального управления методом обратного времени для объекта

с
ограничением на управление ![]() . Необходимо перейти из
начальной точки
. Необходимо перейти из
начальной точки ![]() в конечную
в конечную ![]() с критерием оптимальности
с критерием оптимальности
 .
.
запишем уравнения объекта в переменных состояния

где ![]() .
.
Поскольку рассматривается задача оптимального быстродействия, оптимальное управление носит релейный характер
![]() .
.
Для определения ![]() в виде функции переменных состояния используем
метод поверхностей переключения. Предварительно запишем уравнения объекта в
обратном времени
в виде функции переменных состояния используем
метод поверхностей переключения. Предварительно запишем уравнения объекта в
обратном времени

Будем рассматривать
следующую задачу перехода: ![]() . Для получения фазовых траекторий в
пространстве состояний воспользуемся методом непосредственного интегрирования,
рассмотрим последовательно два значения оптимального управления.
. Для получения фазовых траекторий в
пространстве состояний воспользуемся методом непосредственного интегрирования,
рассмотрим последовательно два значения оптимального управления.
1.
Случай, когда ![]() . Уравнения замкнутой системы имеют вид
. Уравнения замкнутой системы имеют вид

Интегрируя последовательно второе, а затем первое уравнения, получим
или при нулевых начальных условиях
Теперь исключим время, ![]() , и запишем уравнение фазовой траектории,
выходящей из начала координат при положительном управлении,
, и запишем уравнение фазовой траектории,
выходящей из начала координат при положительном управлении,
![]() .
.
2.
Случай, когда ![]() . При этом уравнения замкнутой системы
следующие:
. При этом уравнения замкнутой системы
следующие:

После интегрирования имеем
или
Исключая время, ![]() , получим
, получим
 .
.
В этом случае уравнение фазовой траектории, выходящей из начала координат при отрицательном управлении, принимает вид
![]() .
.
Для каждой фазовой траектории (рис. 12.11) определим направление движения и оставим ту половину параболы, которая соответствует движению из начала координат. Затем объединим эти две полутраектории в одну и получим уравнение линии переключения в виде
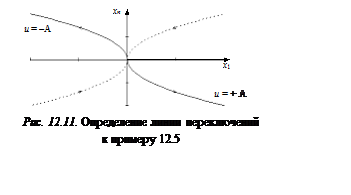 |
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.