Центровой профиль (эквидистантная кривая) строится следующим образом. Радиусом ролика r0 проводим целый ряд дуг, центры которых лежат на действительном профиле кулачка. Огибающая этих дуг и будет центровым профилем (рис. 6).
Таким образом, задача об определении положения и перемещения толкателя, снабженного роликом, по заданному углу поворота кулачка φ легко сводится к решению предыдущей задачи.
Определение положения толкателя и его перемещения при повороте кулачка на угол φ понятно из рис. 5.
Нецентральный кулачковый механизм с толкателем, снабженным роликом (Рис. 7)
Здесь также центр вращения ролика (точка А) будет перемещаться относительно кулачка по центровому профилю. Для определения положения толкателя при повороте кулачка на угол φ применяем метод обращения, т.е. кулачок оставляем неподвижным, а толкатель вместе со стойкой поворачиваем на заданный угол φ относительно оси вращения кулачка в направлении, противоположном его вращению.
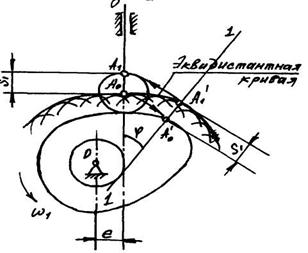
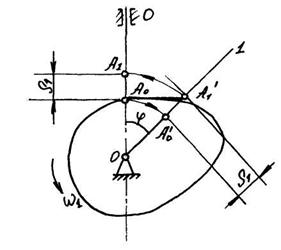
Рис. 7. Определение положения толкателя, снабженного роликом, для нецентрального кулачкового механизма
Так как линия движения толкателя находится от оси вращения кулачка 0 на постоянном расстоянии l (эксцентриситет), то и при повороте она останется от оси 0 на этом расстоянии, т.е. будет касаться окружности радиусом l и займет положение 1-1. Точка пересечения линии 1-1 с центровым профилем кулачка (точка A1’) будет искомым относительным положением центра ролика. Для определения действительного положения центра ролика нужно радиусом 0A1’ сделать засечку на линии действительного движения толкателя. Полученная точка A1 и есть действительное искомое положение центра ролика. Отрезок А0’ А1’ есть искомое перемещение толкателя.
Это перемещение можно измерить и по линии 1-1, для чего начальное положение оси ролика (А0) нужно радиусом 0A0 перенести на эту линию (получаем точку А0’). Отрезок А0’ А1’ также есть искомое перемещение толкателя:
S1 = А0’ А1’ = A0A1.
На рис. 8а показано определение относительных положений толкателя и его перемещений за полный оборот кулачка (соответствующие перемещения - отрезки 1-1, 2-2, 3-3, показаны жирными линиями). По этим данным на рис. 8б построена зависимость перемещения толкателя SA от угла поворота кулачка φ (или времени t ).
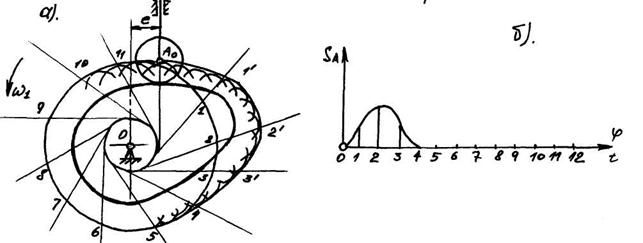
Рис.8. Определение ряда положений толкателя, снабженного роликом, для нецентрального кулачкового механизма и построение диаграммы перемещения толкателя.
Кулачковый механизм с плоским толкателем (Рис. 9)
|
Рис. 9 . Определение положения плоского возвратно-поступательно движущегося толкателя |
Для определения положения плоского толкатели при повороте кулачка на заданный угол φ применяем метод обращения, т.е. кулачок оставляем неподвижным, а толкатель (вместе со стойкой) поворачиваем на угол φ в направлении, противоположном направлению вращения кулачка. Линия движения толкателя займет при этом положение 0-1.
Для определения положения тарелки толкателя нужно к профилю кулачка провести касательную таким образом, чтобы она была перпендикулярна к линии 0-1 (обычно тарелка перпендикулярна к направлению движения толкателя. Если угол между тарелкой и направлением движения толкателя отличается от прямого, то при построении касательную нужно проводить к линии 0-1 под соответствующим углом). Проведенная касательная есть искомое относительное положение тарелки толкателя. Для определения истинного положения толкателя нужно радиусом 0А1’ (точка A1’ есть точка пересечения касательной с прямой 0-1) сделать засечку на действительном направлении движения толкателя (точка A1). Отрезок A0 A1 есть искомое перемещение толкателя. Это перемещение можно определить и но прямой 0-1, для чего радиусом 0А0 нужно сделать засечку на этой прямой (точка А0’). Отрезок A0’ A1’ также есть искомое перемещение:
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.