Закон движения с постоянным ускорением (рис. 2,б). Он характеризуется тем, что на границах фаз при t =0 , t =Тф и t =Тф/2 ускорения (и силы инерции) мгновенно меняют свое значение в пределах конечной величины. В этом случае движение толкателя сопровождается "мягким ударом". Из рис, 2,б видно, что участки кривой перемещений толкателя 0А и АВ являются параболами. Для построения этих парабол точки 0 и В соединяются прямой линией и на ординате, соответствующей углу φА , находится точка А. Отрезок ОС делится на произвольное число равных частей и проводятся вертикальные линии. Отрезок АС делится на столько же равных частей и точки деления соединяются с точкой 0. Точки пересечения лучей с соответствующими вертикальными линиями дают точки параболы на участке А0. Аналогично строится парабола АВ.
При этом законе движения ускорения, скорости и перемещения толкателя могут быть определены по следующим формулам:

Рис. 2.
Закон движения с ускорением, изменяющимся по синусоиде (рис. 2, в). Он характеризуется отсутствием резких изменений ускорений и скоростей и обеспечивает плавную, безударную работу кулачкового механизма. Ускорения, скорости и перемещения можно определить по формулам:

3. Расчет кулачкового механизма.
Расчет кулачкового механизма может быть проектным или проверочным. Проектный расчет производят при конструировании нового механизма. Учитывая заданные условия работы, конструктор должен обосновать схему механизма, выбрать закон движения ведомого звена и определить размеры звеньев. Проверочный расчет сводится к определению фактического закона движения цикла, нагрузок и напряжений, возникающих в звеньях механизма, размеры которого даны или сняты с натуры.
Цель работы: отработка навыков проверочного расчета кулачковых механизмов.
Оборудование, приборы. материалы:
Проверочный расчет выполняется с использованием комплекта моделей кулачковых механизмов, состоящего из (см. рис. 2):
модели механизма с роликовым толкателем (с силовым замыканием);
модели механизма с плоским толкателем;
модели механизма с роликовым толкателем (с геометрическим замыканием);
модель механизма с роликовым коромыслом (с силовым замыканием) ;
модель механизма с плоским коромыслом;
модель механизма с роликовым коромыслом (с геометрическим замыканием);
модель механизма с роликовым механизмом и контркулачком;
модели пространственного механизма с роликовым коромыслом (с силовым замыканием);
модели пространственного механизма с роликовым толкателем;
модели пространственного механизма с роликовым коромыслом (с геометрическим замыканием);
Определение хода толкателя при его поступательном движении выполняется при помощи индикатора часового типа, а угловые перемещения толкателя и самого кулачка - специальным сектором.
Порядок выполнения работы:
I. Для кулачкового механизма, выданного преподавателем, построить диаграмму перемещений, т.е. зависимость положений толкателя от положения кулачка. Для этого необходимо профиль кулачка и толкателя перенести на лист бумаги и определить положение толкателя минимум для 12 положений кулачка.
Центральный кулачковый механизм с острым толкателем
Пусть дан кулачковый механизм (рис.3). Требуется определить положение толкателя при повороте кулачка на заданный угол φ.
|
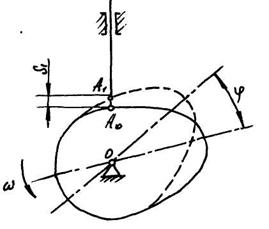
Рис. 3. К определению положения толкателя |
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.