Для исследований были выбраны траектории в виде нисходящих дугообразных (радиус постоянный) спиралей с постоянным коэффициентом наклона по оси Y. Коридор будет заканчиваться на 100 метровом удалении от полосы, в точки с координатой {0,1,-1000}. В момент схода с глиссады высота самолета равна 10 метрам. Стометровое удаление требуется, для того чтобы прекратить спиральное движение и перевести самолет в прямолинейный полет. Оптимальное расстояние необходимое для этих целей требует исследования, в работе оно было выбрано опытным путем. Для различных траектории начальная точка коридора будет отличаться.
Координаты прямоугольников вычислялись при помощи системы Matlab по функциональным зависимостям вида:
|
|
3.1.1 |
Где
n – число образующих прямоугольников
R – радиус траектории
х, у, z – вектор размерности n , состоящий из значений координат, прямоугольников по заданной оси.
![]() – Угол
поворота прямоугольников
– Угол
поворота прямоугольников
Программы для вычисления координат прямоугольников используемые в работе приведены в приложении 3.
Координаты подвижных объектов определяются непосредственно в процессе выполнения эксперимента и при помощи специальных инструментов передаются в пространственную модель.
После того как определены все координаты входящих в систему объектов, можно приступать к написанию самой программы визуализации
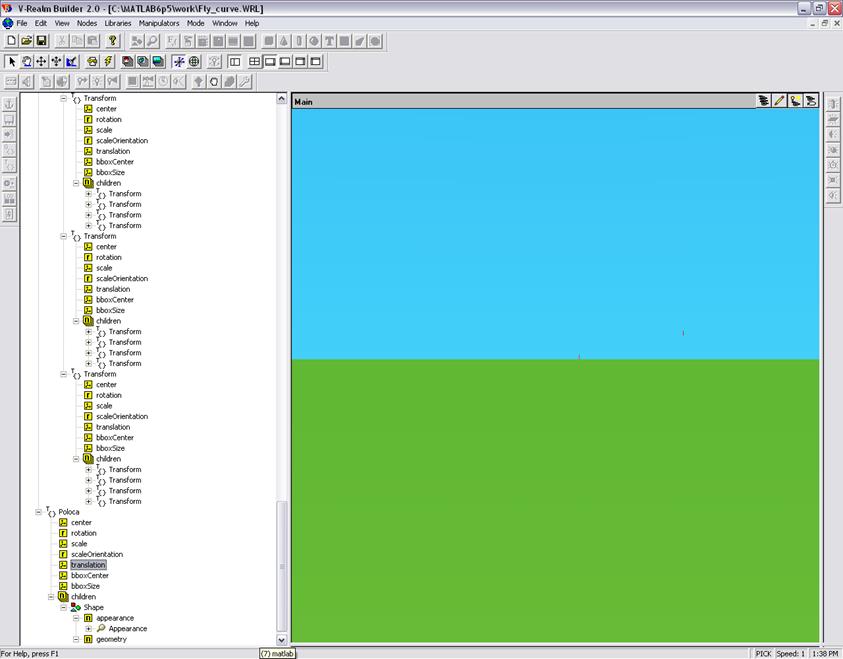
Для написания программы воспользуемся приложением V-Realm Builder 2.0. Запуск приложения производиться из папки MATLAB6p5\toolbox\vr\vrealm\program\vrbuild2.exe (путь указан относительно директории установки Matlab).
|
|
|
Вид программы V-Realm Builder 2.0. |
Справа находиться рабочая область. В нем можно увидеть текущей результат работы. Слева от рабочей области находиться дерево объектов, здесь объекты создаются. Сверху находиться панель инструментов.
Рассмотрим основные типы объектов, используемые в работе, а также способы их основные свойства.
|
Базовый тип |
Способ добавления |
Основные свойства |
|
Background. - горизонт |
Выберите пункт New world в дереве объектов, затем нажмите |
skyColor – цвет неба GroundColor – цвет земли. Есть возможность указания градиентных заливок для земли и неба, а также использовать текстуры для задания вида повехности |
|
Box – пространственный прямоугольник |
Выберите New world или дугой объект в дереве и
нажмите |
Size – геометрические размеры в принятой системе координат |
|
Spfere - cфера |
Аналогично Box. Нажмите |
Radius – радиус сферы |
|
Viewpoin – точка обзора |
Выберите пункт New world в дереве объектов, затем нажмите |
Fieldofview – угол обзора Posision – текущая координата точки обзора ( камеры ) Orientation – угол поворота камеры ( задается в кватернионах) |
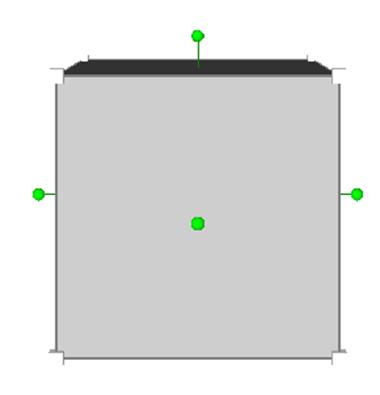
Для изменения свойств любого объекта базового типа используется инструмент Transform. Рассмотрим технологию использования этого инструмента на примере создания одного из прямоугольников образующих траекторию полета.
Прямоугольник будет состоять из 4 объектов типа Box, заданного геометрического размера, которые будут определенным образом располагаться между собой. Также указывается общее положение и угол поворота объектов относительно принятой системе координат.
Для указания общих для всех объектов параметров воспользуемся
инструментом типа Transform. Выберем пункт в дереве
объектов New world и нажмем кнопку insert transform ![]() ,находящуюся слева от дерева
объектов.
,находящуюся слева от дерева
объектов.
В дереве появиться структура следующего вида:
|
|
Данная структура позволит указывать координаты, угол попорота, и масштаб всех объектов принадлежащих дереву children. |
Добавим 4 объекта типа Box в
дерево children, для этого выберем дерево и нажмем
кнопку Insert box ![]() . Данную
операцию проделываем 4 раза, для добавления 4 объектов.
. Данную
операцию проделываем 4 раза, для добавления 4 объектов.
|
|
|
|
Дерево объектов |
Рабочая область |
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.