Во время проведения экспериментов все данные, определяющие текущее положение самолета записывались в файл данных Matlab, при помощи блока To file.
В качестве критерия оценки каждого режима (эксперименты с одинаковыми настройками системы визуализации) и траектории были выбраны следующие параметры:
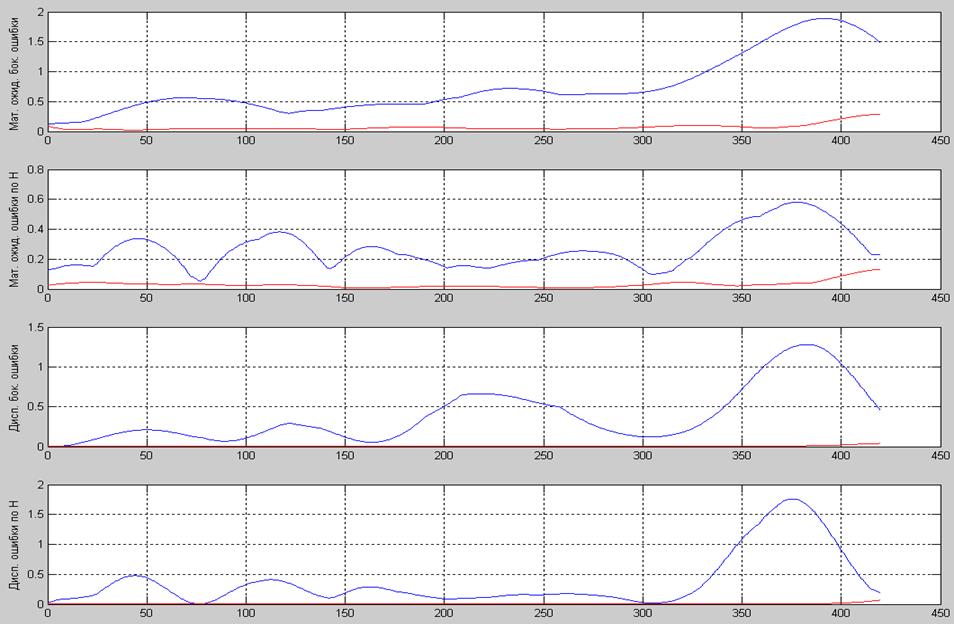
- математическое ожидание ошибки однотипных экспериментов как функция от удаления от полосы.
- Дисперсия ошибок как функция удаления от полосы.
Математическое ожидание определяется по формуле:
|
|
4.2.1 |
Дисперсия определяется по формуле:
|
|
4.2.2 |
Где
![]() - координаты «правильной» траектории для
выбранного сечения.
- координаты «правильной» траектории для
выбранного сечения.
![]() - текущее координаты самолета для
выбранного сечения i-го эксперимента.
- текущее координаты самолета для
выбранного сечения i-го эксперимента.
Для определения точности пилотирования, строятся графические зависимости значений математического ожидания и дисперсии как функция удаления от аэродрома.
Текст программы обработки данных и расчета математического ожидания и дисперсии как функция удаления от полосы для выбранного режима приведен в приложении 4.
В качестве критерия оценки результатов опытов для различных режимов (под режимом понимается группа опытов с одинаковыми параметрами системы отображения информации, и одинаковой траекторией захода на посадку), выберем следующие характеристики.
- Среднее математическое ожидание ошибки режима
- Максимальное математическое ожидание ошибки режима
- Средняя дисперсия ошибки режима
- Максимальная дисперсия ошибки режима.
При расчете параметров средней и максимальной ошибки отбрасываются значения начального участка полета. Это сделано в целях исключения в оценке особенностей пилотирования связанных с адаптацией летчика к управлению в «коридоре», а также ошибок связанных с «заходом» в «коридор».
Программа сравнения различных режимов, а также построения графических зависимостей средней и максимальной ошибки как функция от параметров системы визуализации приведена в приложении 5
Для оценки точности совершения посадки рассчитывается значение математического ожидания и дисперсии ошибки относительно заданной точки в момент касания полосы колес самолета для трех различных вариантов посадки. Далее строятся графические зависимости мат. ожидания и дисперсии.
Программа вычисления результатов и построения графических зависимостей приведена в приложении 6
5.1 Особенности пилотирования
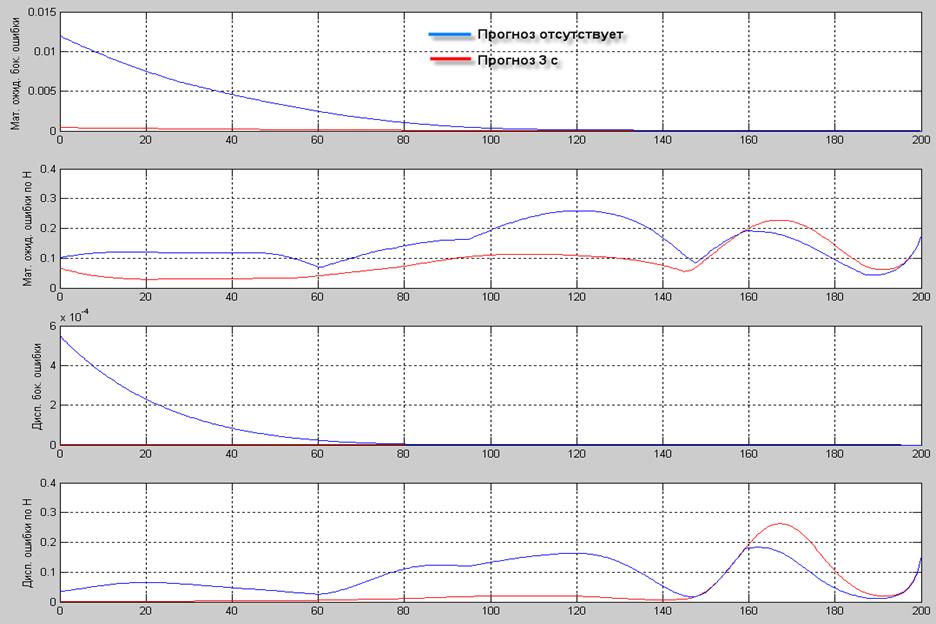
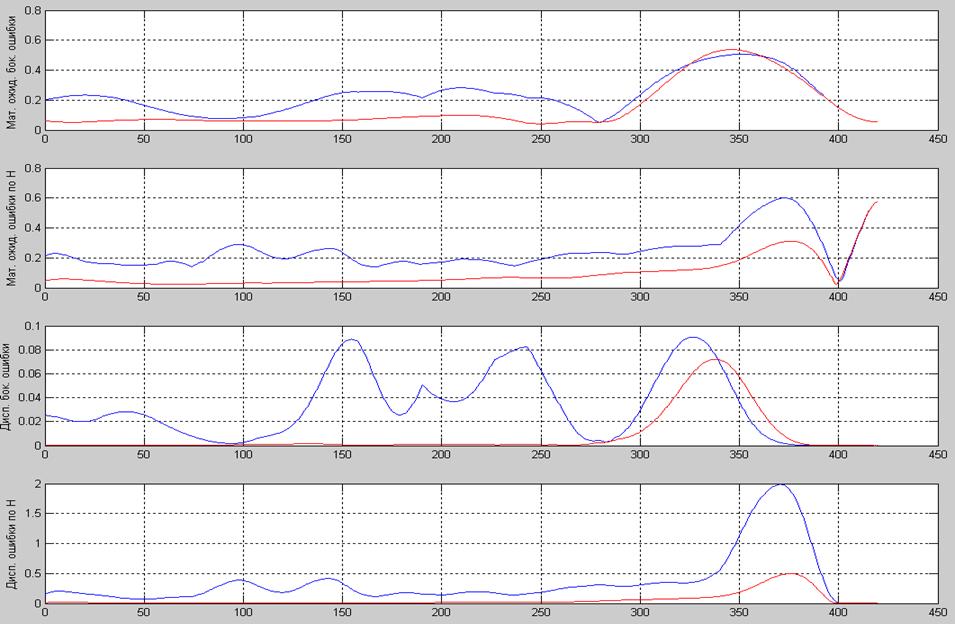
Для того чтобы оценить особенности пилотирования самолета при различных условиях построим графики зависимости Математического ожидания и дисперсии как функция удаления от аэродрома, для следующих режимов:
|
|
|
Прямолинейный полет, размер окон 7,5 м, расстояние 200 м |
|
|
|
Радиус разворота 20000м, размер окон 7,5 м, расстояние 200 м |
|
|
|
Радиус разворота 10000м, размер окон 7,5 м, расстояние 200 м |
Характер кривых сохраняется для всех остальных расчетных случаев (различных траекториях, различных размеров и расстояний между прямоугольниками) и потому приводить графические зависимости для всех исследованных вариантов не имеет смысла.
Проанализировав полученные результаты можно сделать следующие выводы:
- Математическое ожидание и дисперсия ошибки по высоте сохраняется практически постоянной для любой траектории, это легко объясняется тем, что характер снижения не меняется в зависимости от радиуса кривизны.
- Математическое ожидание и дисперсия боковой ошибки возрастают с увеличением радиуса кривизны траектории (дисперсия ошибки для радиуса разворота 10000 м примерно в 4 раза больше значений дисперсии для прямолинейного полета) в связи с возрастанием сложности выполнения точного пилотирования. Значения параметров ошибки при радиусе разворота 10000м достаточны для выполнения посадки ( математическое ожидание ошибки примерно 1,5 м , дисперсия примерно 0,2).
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.