2.1 Уравнения движения самолета
Воспользуемся следующими уравнениями:
|
где |
2.3.1 |
|
|
2.3.2 |
|
|
2.3.3 |
|
|
2.3.4 |
Добавим к систему уравнений, определяющие положение самолета в земной системе координат
|
|
2.3.5 |
2.2 Исходные данные для проведения расчетов
Разрабатываемая система не подразумевает использование на каком-то определенном типе самолетов, и может применяться для выполнения целого ряда задач точного пилотирования, но в связи с тем что наибольший эффект будет получен при использовании системы в гражданской авиации выберем в качестве самолета прототипа среднемагистральный самолет Ту-154
|
|
|
Самолет Ту-154 |
|
Взлетная масса самолета - |
94000 кг |
|
Моменты инерции Ix Iy Iz |
1600000 5700000 6100000 |
|
Площадь крыла - S |
180 м2 |
|
Размах крыла - l |
37,5 м |
|
Средняя аэродинамическая хорда - ba |
5,3 м |
|
Координаты центра тяжести - |
0,35 |
Данные снимаются с графических зависимостей, полученных из альбома исходных данных.
Так как исследуемый режим лежит в районе малых чисел М, будем считать аэродинамические коэффициенты постоянными:
|
|
=6,3 1/рад |
|
=-1.25 1/рад |
|
=-0,2 |
|
|
=-1,17 |
|
=-0,24 |
|
=-0,38 |
|
|
=-0,1 |
|
=-0,66 |
|
=-0,04 |
|
|
=-0,74 |
|
=-0,08 |
|
=-0,09 |
|
|
=-0,025 |
|
=0 |
||
|
|
=-0,18 |
![]() где
где ![]()
![]() где
где ![]()
2.3 Моделирование захода на посадку на ЭВМ
Моделирование проводиться с помощью пакета Simulink системы Matlab 6.5
В процессе моделирования широко используются средства пакета Toolbox Aerospace Blockset для имитации условий стандартной атмосферы, работы двигателей, и расчета проекции на различные системы координат.
В целях уменьшения размерности системы дифференциальных уравнений, модель составлена из 4 вычислительных блоков, содержащие различные части системы, и вычисляемые со смещением по времени. Применение структуры данного типа позволяет значительно снизить требуемую вычислительную мощность компьютера.
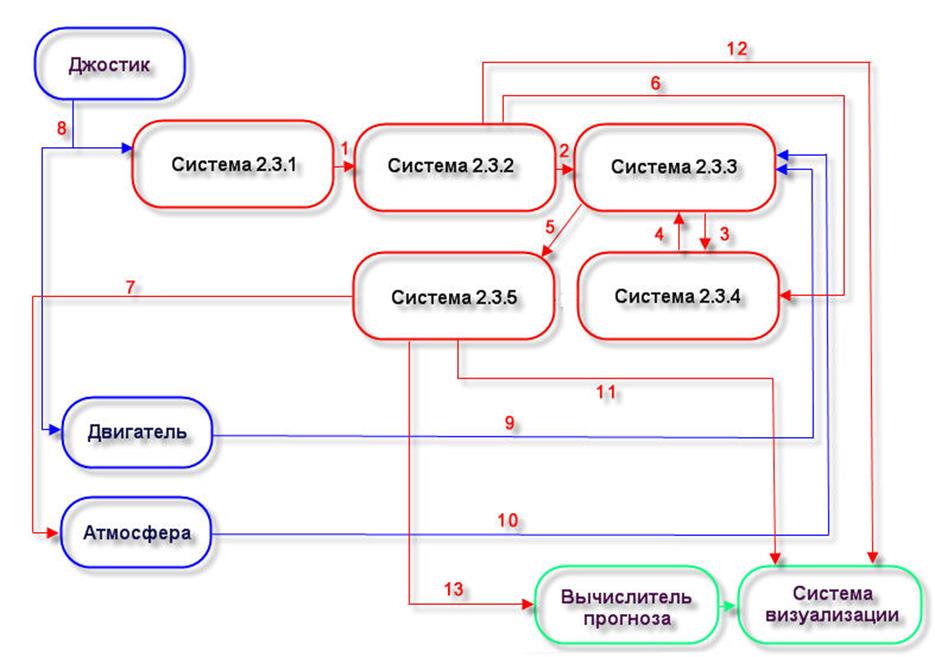
Ниже приведена структурная схема решателя дифференциальных уравнений. В целях упрощения записи внутри блоков приведены коды уравнений описанных в разделе 2.1
|
|
|
Структурная диаграмма решателя |
Цифрами обозначены передающие сигналы между блоками:
1.
![]()
2.
![]()
3.
![]()
4.
![]()
5.
![]()
6.
![]()
7.
![]()
8.
![]()
9.
![]()
10.
![]()
11.
![]()
12.
![]()
13.
![]()
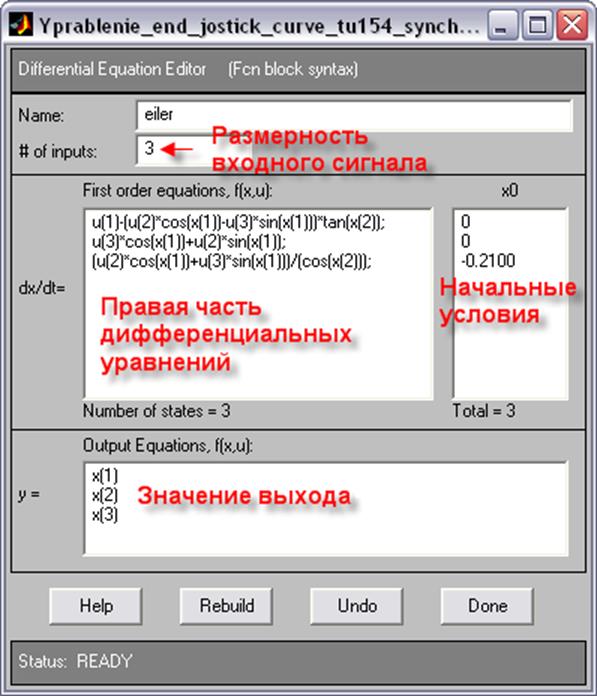
Для решения нелинейных дифференциальных уравнений с постоянными коэффициентами используется стандартный инструментарий Matlab. Для создания решения системы будем использовать блок Differential equation editor. Блок позволяет автоматически создавать подсистемы для решения дифференциальных уравнений.
|
|
|
Differential equation editor |
Входные переменные обозначаются при помощи маски u(i), где i – порядковый номер входной переменной.
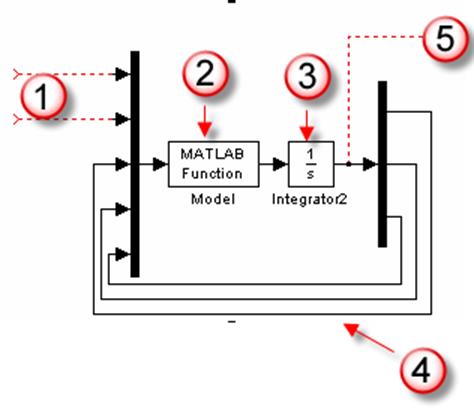
В связи с тем что в пакете Simulink отсутствуют стандартные инструменты для решения дифференциальных уравнений с переменными коэффициентами, приходиться находить обходные пути.
Решатель состоит из нескольких блоков:
|
|
|
Решатель дифференциальных уравнений с переменными коэффициентами |
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.