Зададим параметры объектов Box образующих прямоугольник.
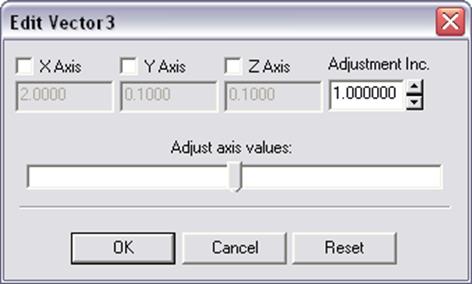
Для каждого объекта box дерева children зададим параметр size ( геометрический размер )
|
|
|
Окно указания параметра size |
В качестве примера выберем следующие геометрические характеристики : длинна 20 м , ширина и высота 1 м. Операцию повторим 4 раза для каждого элемента Box.
|
|
|
Рабочая область после указания геометрических размеров. |
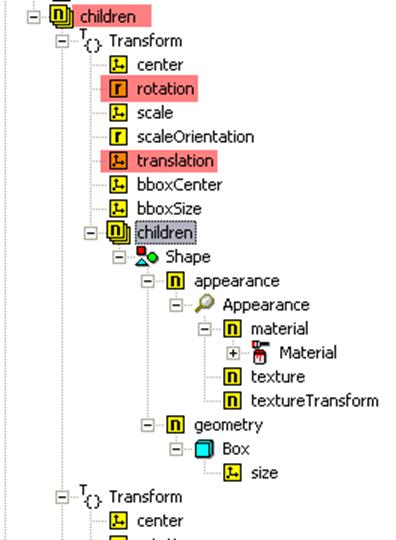
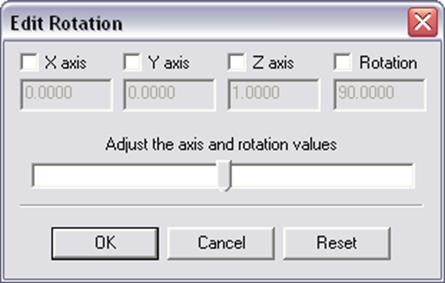
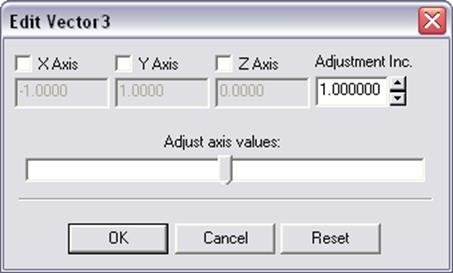
Теперь требуется указать правильное положение объектов. Дл этого зададим параметры translation ( перемещение ) и Rotation ( поворот ) для трех из четырех объектов transform дерева children.
|
|
|
|
|
|
||
|
Дерево объектов |
Окна указания угла поворота и положения |
|
|
Для указания цвета объектов требуется настроить параметры DiffuseColor и EmisiveColor, дерева Material для каждого элемента входящего в дерево Children |
|
|
|
Окончательный результат |
||
Теперь координаты и угол разворота полученного прямоугольника можно указывать, изменяя параметры Position и Orientation, в свойствах объекта transform находящегося во главе созданного дерева.
Для подключения созданной трехмерной модели местности к ранее созданной модели самолета воспользуемся блоком VR-Sink библиотеки Virtual Reality Toolbox.
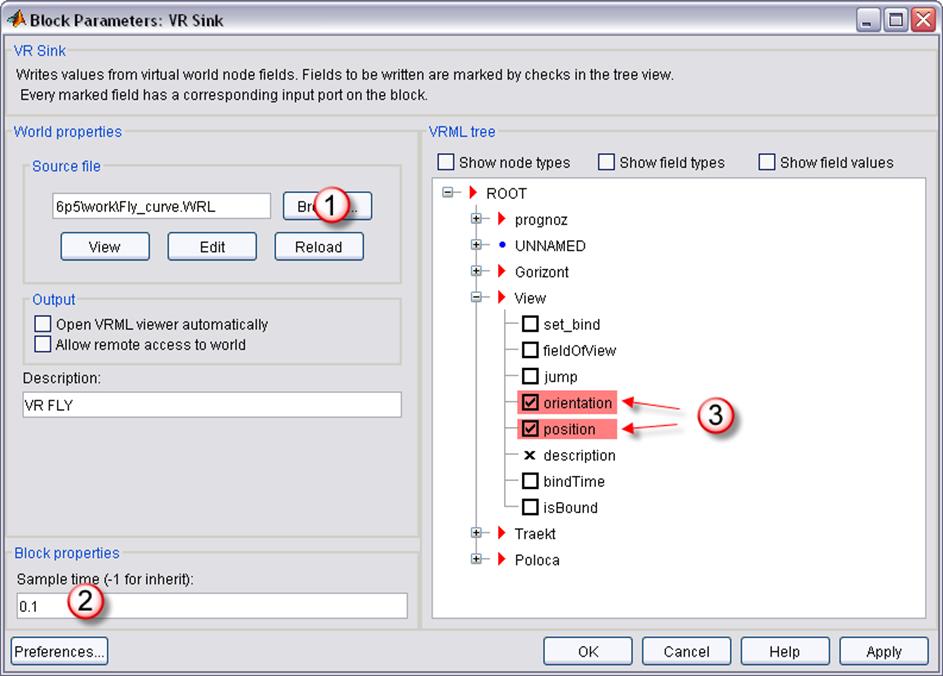
Для этого вставим блок в ранее созданную модель, откроем его свойства и зададим следующие параметры:
|
|
|
1. Путь доступа к файлу визуализации 2. Частоту дискретизации изображения 3. Параметры которые в процессе моделирования не постоянны ( положение и угол поворота самолета, координаты точки прогноза и т .д. |
Для передачи не постоянных параметров в систему визуализации, можно использовать стандартные средства передачи данных Simulink.
Данные, передающиеся в систему визуализации, должны удовлетворять следующим требованиям:
- Размерность сигнала Simulink должна совпадать с числом переменных которые система визуализации использует для определения параметра. Порядковый номер переменной в сигнале совпадает с порядком указания параметров в окнах свойств программы V-Realm Builder с лева на право.( например для параметра Position порядок переменных будет {x,y,z}).
- Направление вектора z в системе визуализации соответствует направлению вектора X в земной системе координат, и соответственно направление вектора x вектору Z
- Частота дискретизации окна визуализации не должна быть меньше шага интегрирования модели.
- Сигнал определяющий угол поворота объекта состоит из проекции единичного вектора на оси Х,У,Z, принятой системы координат, и угла поворота объекта относительно этого вектора.
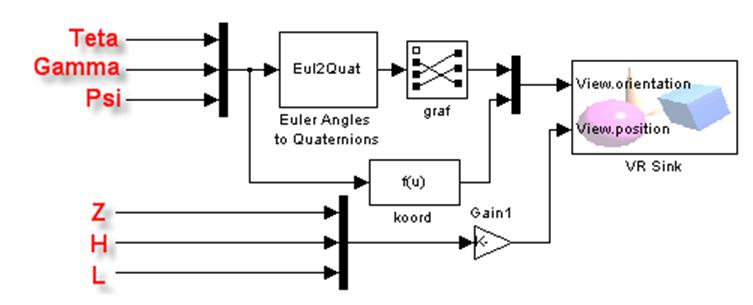
Для перевода из углов Эйлера в сигнал определяющий угол поворота используемый в системе визуализации можно воспользоваться блоком Euler Angles to Quaternions, из библиотеки Aerospace Blockset. Угол поворота системы рассчитывается по формуле:
|
|
3.1.2 |
|
|
|
Вид структуры передачи данных в систему визуализации |
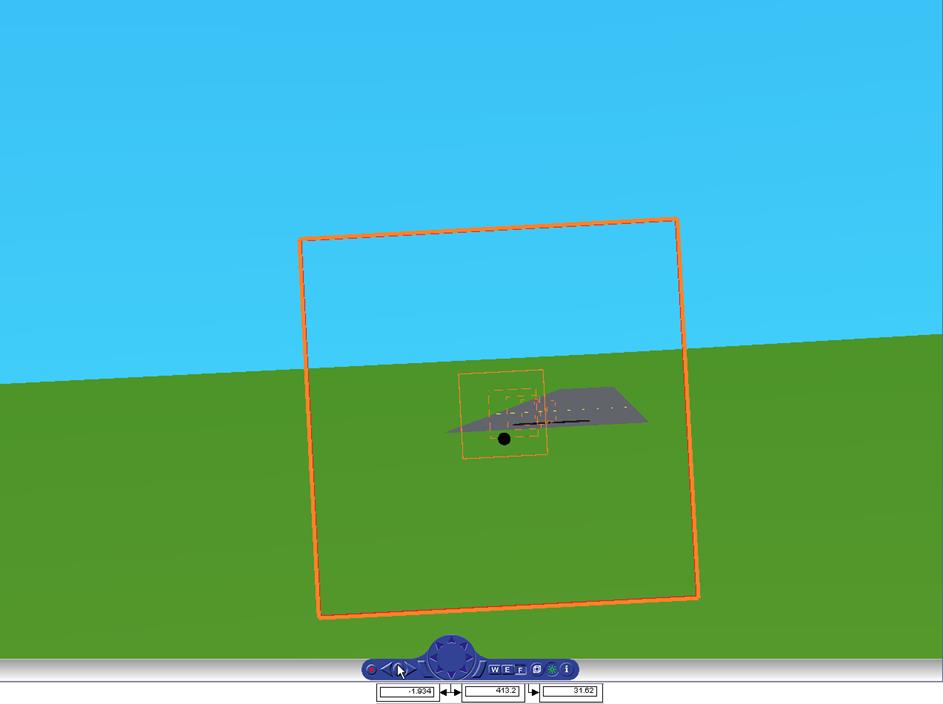
Для запуска окна системы визуализации требуется нажать кнопку View в окне свойств блока VR-Sink.
|
|
|
Рабочее окно системы визуализации |
4.1 Классификация поведенных экспериментов
В целях исследования вопросов описанных в разделе 1.6.1 Перечень вопросов рассматриваемых в дипломной работе было принято решение о проведение следующих экспериментов.
Решаемые задачи:
- Исследование возможности выполнения посадки с использованием системы пространственного отображения информации
- Исследование особенностей пилотирования
- Исследование влияния отображения прогноза на точность пилотирования.
- Исследование влияния параметров системы визуализации (размер прямоугольников, расстояние между ними) на точность пилотирования.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.