![]() - составляющая, характеризующая
медленные изменения погрешности.
- составляющая, характеризующая
медленные изменения погрешности.
В [7] показано, что
 (В.7)
(В.7)
где ![]() - интервал наблюдения,
- интервал наблюдения,
![]() - интервал для которого заданы
характеристики.
- интервал для которого заданы
характеристики.
С учетом (В.6) и (В.7) запишем(В.5) в виде
 (В.8)
(В.8)
где  - момент изменения
азимута
- момент изменения
азимута ![]() ВС,
ВС,
![]() - случайные ошибки измерений,
обусловленные НЭМП;
- случайные ошибки измерений,
обусловленные НЭМП;
 - скорость линейного отклонения
от лини курса при условии, что
- скорость линейного отклонения
от лини курса при условии, что  имеют
нормальное распределение с нулевыми средними, после ряда соответствующих
преобразований математическое ожидания процессов
имеют
нормальное распределение с нулевыми средними, после ряда соответствующих
преобразований математическое ожидания процессов ![]() и Z.
и Z.
Имеем
 (В.9)
(В.9)
 (В.10)
(В.10)
где V – путевая скорость ВС.
На рис. В.2 и В.3 представлены зависимости погрешности самолетовождения, определяемые погрешностью РЛС, вызванными, в свою очередь, НЭМП.
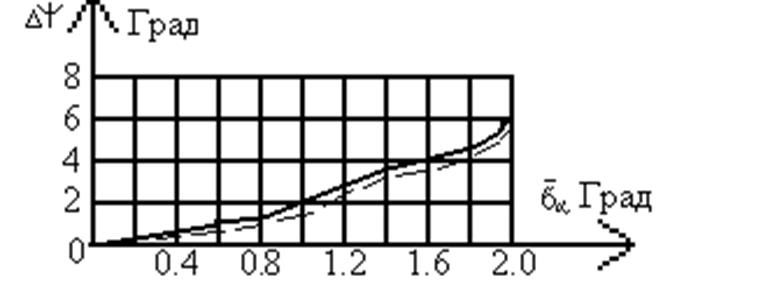
Рис. В.2. Зависимость погрешности выдерживания угла курса в зависимости от ошибок РЛС
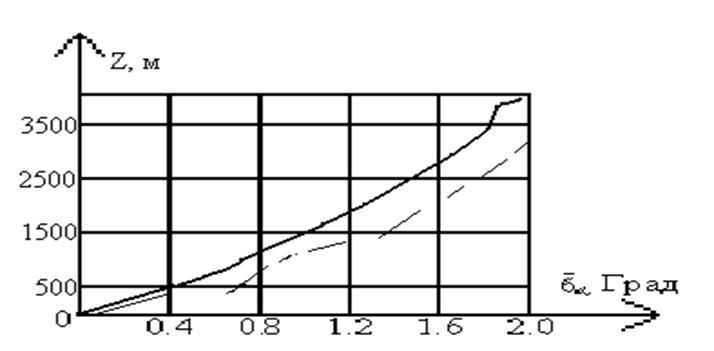
Рис.В.3. Зависимость отклонения от линии заданного пути в зависимости от погрешности РЛС
Для оценки пропускной способности зоны УВД используется временная модель загруженности диспетчера, в которой функции диспетчера представляется ограниченным числом элементарных операций, каждая из которых требует определенных временных затрат [5,6].
![]() (В.11)
(В.11)
![]() - время ведения радиотелефонной
связи «земля борт земля»;
- время ведения радиотелефонной
связи «земля борт земля»;
![]() - время получения информации с
индикатора РЛС;
- время получения информации с
индикатора РЛС;
![]() - время ведения наземной связи
по приему и передачи ВС;
- время ведения наземной связи
по приему и передачи ВС;
![]() - время ведения графического
контроля;
- время ведения графического
контроля;
![]() время на обслуживание потока ВС
при нарушении норм продольного, бокового и вертикального эшелонирования
соответственно;
время на обслуживание потока ВС
при нарушении норм продольного, бокового и вертикального эшелонирования
соответственно;
![]() - время получения внепланового
потока сообщений.
- время получения внепланового
потока сообщений.
Загрузка диспетчера характеризуется показателем загруженности, определяемым отношением времени, затраченного непосредственно на управление потоком ВС, к общему ресурсу рабочего времени
 . (В.12)
. (В.12)
На основании многочисленных экспериментов установлено что минимум
ошибочных действий достигается при ![]() = 0,5 и
= 0,5 и ![]() =0.1
=0.1
Средние время затрачиваемое диспетчером УВД на управление одним ВС при существующей технологии определяется выражением:

![]() (В.12)
(В.12)
![]() - длительность i
-го сеанса связи «земля борт земля»;
- длительность i
-го сеанса связи «земля борт земля»;
![]() - длительность паузы между
сообщениями;
- длительность паузы между
сообщениями;
![]() - время получения информации об
одном ВС с индикатора РЛС;
- время получения информации об
одном ВС с индикатора РЛС;
![]() - время воздействия с другими
диспетчерами;
- время воздействия с другими
диспетчерами;
![]() - время ведения графика;
- время ведения графика;
![]() - количество технических
операций.
- количество технических
операций.
Экспериментальное исследование, проведенное рядом авторов,
показывает, что длительность связи ![]() описывается
распределением Эрланга третьего и четвертого порядка
описывается
распределением Эрланга третьего и четвертого порядка ![]() , где А,В,С – коэффициенты, значение
которых зависит от сложности УВД.
, где А,В,С – коэффициенты, значение
которых зависит от сложности УВД.
Средняя длительность радиотелефонной связи «земля-борт» и «борт - земля»
 , для РЦ;
, для РЦ;
 , для ДПП, (В.13)
, для ДПП, (В.13)
где  : Мса – максимальное
число связей диспетчера УВД
: Мса – максимальное
число связей диспетчера УВД
Из выражения (В.13) видно, что средняя длительность связи «земля-борт-земля»в зоне РЦ составляет 11-12 с, а в зоне подхода 9-10 с.
Общее количество сообщений ![]() ,на одно
ВС в зонах РЦ может иметь значение от 3 до 5, а зонах подхода от 4 до 6.
,на одно
ВС в зонах РЦ может иметь значение от 3 до 5, а зонах подхода от 4 до 6.
Время получения информации с индикатора РЛС при вероятности обнаружения цели, равной единице, определяется выражением
![]() ,
,
где ![]() - угол обзора
воздушного пространства
- угол обзора
воздушного пространства
![]() - угловая скорость обзора;
- угловая скорость обзора;
![]() -
коэффициент усиливающий запоминающие свойства индикатора;
-
коэффициент усиливающий запоминающие свойства индикатора;
![]() - время памяти индикатора;
- время памяти индикатора;
![]() - коэффициент, определяемый
условиями освещения рабочего места диспетчера.
- коэффициент, определяемый
условиями освещения рабочего места диспетчера.
Величина ![]() независимо от зоны УВД
имеет значение от 3 до 4
независимо от зоны УВД
имеет значение от 3 до 4
Средняя длительность наземной связи по приему и передачи ВС, как показали экспериментальное исследование, в зависимости от количества ВС, находящихс я под управлением диспетчера (N), имеет вид:
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.