для второго гауссова положения
![]() ; (3-11)
; (3-11)
для первого ламонова положения
![]() ; (3-12)
; (3-12)
для второго ламонова положения
![]() ; (3-13)
; (3-13)
где р и q — постоянные коэффициенты; r — расстояние между центрами стрелки ns и отклоняющего магнита NS. В реальном магните значения р и q зависят от размеров магнита и от законов распределения магнитных масс, вследствие чего они получили названия коэффициентов распределения. Для тел, ограниченных поверхностями второго порядка (шар, эллипсоид), значения коэффициентов распределения могут быть вычислены, во всех остальных случаях они определяются экспериментально.
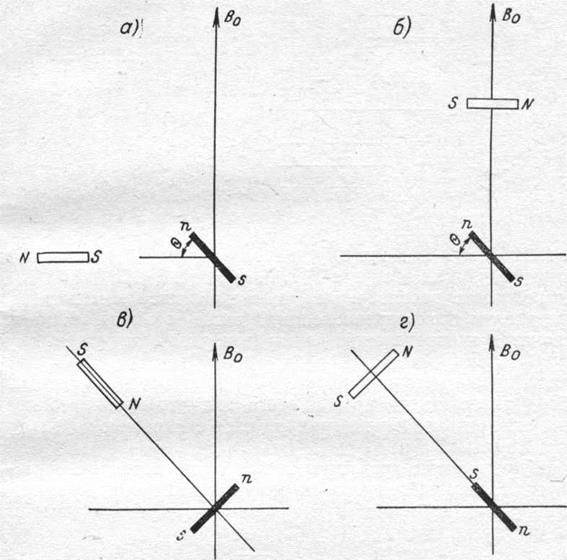
Рис. 3-9. Взаимное расположение магнитов
Период
качания магнита в горизонтальной плоскости, находящегося в магнитном поле,
определяется из уравнения (3-5), если положить р = 0 и ![]() :
:
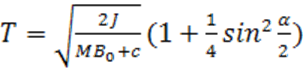 ,
(3-14)
,
(3-14)
где α — амплитуда колебаний магнита.
Значение модуля магнитной индукции может быть найдено в результате совместного решения относительно М и В0 уравнения (3-14) и одного из уравнений (3-10)—(3-13). Например, решение уравнений (3-14) и (3-12) имеет вид [3-6]:
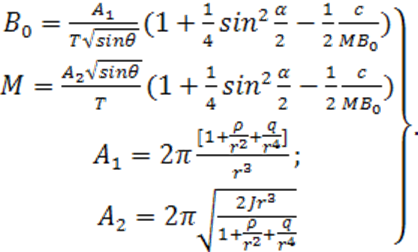 (3-15)
(3-15)
Как видно
из (3-15), для определения В0 необходимо
произвести измерение следующих величин: T, r, ![]() , J, р, q и с/(МB0).
, J, р, q и с/(МB0).
Таким образом, рассмотренный метод является абсолютным, так как определение всех перечисленных выше величин в конечном счете сводится к определению длины (или угла), массы и времени [3-6].
Относительные методы измерения В0 отличаются от рассмотренного абсолютного метода прежде всего тем, что механический преобразователь предварительно градуируется с помощью той или иной образцовой меры.
Например, процесс градуировки приборов, основанных на методе Гаусса, заключается в экспериментальном определении множителя А1 путем наблюдения полупериода T и угла θ в магнитном поле с известным значением В0:
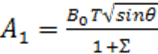 ,
,
где ∑ — сумма всех поправочных коэффициентов.
При относительном методе измерения отпадает необходимость в измерении расстояния между магнитами r, момента инерции J и коэффициентов распределения р и q. Необходимо только при наблюдениях устанавливать магнит всегда в одном и том же положении, чтобы иметь J и r постоянными.
Относительные методы измерения отличаются большей простотой и меньшей трудоемкостью, однако погрешность измерения относительных методов, основанных на использовании механических преобразователей, как правило, примерно на порядок ниже, чем абсолютного.
Глава четвертая ИНДУКЦИОННЫЕ
ПРЕОБРАЗОВАТЕЛИ
4-1. Классификация индукционных преобразователей
Как отмечалось в § 1-3, суммарная э. д. с, наводимая в контуре, может быть разделена на трансформаторную э. д. с. и э. д. с. движения. Анализируя каждую из этих составляющих, можно провести дальнейшее разделение и выделить наиболее характерные типы индукционных преобразователей.
Пусть
имеется внешнее поле В0, которое необходимо измерить.
Поместим в это поле индукционный преобразователь. Будем считать также, что
преобразователь в общем случае имеет сердечник, изготовленный из вещества с
относительной магнитной проницаемостью, отличной от единицы, т. е. µ ![]() 1. Тогда, если магнитное поле однородно,
а сердечник имеет форму шара или эллипсоида вращения, магнитный поток через
контур можно представить в виде: Ф = B
1. Тогда, если магнитное поле однородно,
а сердечник имеет форму шара или эллипсоида вращения, магнитный поток через
контур можно представить в виде: Ф = B![]() s = B0-Y, где Y - обобщенный
параметр преобразователя. В общем случае: В
s = B0-Y, где Y - обобщенный
параметр преобразователя. В общем случае: В ![]() В0 и Y = f (В0).
Для слабых полей, когда возможна линеаризация начального участка кривой
намагничивания,
В0 и Y = f (В0).
Для слабых полей, когда возможна линеаризация начального участка кривой
намагничивания,
Y = [µ*]![]() s (4-1)
s (4-1)
Где [µ*] - тензор относительной магнитной проницаемости сердечника.
Тензор [µ*] - симметричный. Его матрица имеет вид:
 ,
,
где ![]() ,
, ![]() ,
, ![]() — значения
относительной проницаемости сердечника в направлениях его главных осей (с
которыми связана система координат х,
у, z). Каждая компонента тензора может
быть вычислена по формуле [4-1]:
— значения
относительной проницаемости сердечника в направлениях его главных осей (с
которыми связана система координат х,
у, z). Каждая компонента тензора может
быть вычислена по формуле [4-1]:
![]() , (4-2)
, (4-2)
где µ — относительная магнитная проницаемость вещества (предполагается изотропной); N — коэффициент размагничивания и i = х, у, z — индекс соответствующего направления.
В том частном случае, когда нормаль контура (ось измерительной катушки) s° совпадает с одной из главных осей сердечника следует учитывать только одну компоненту тензора. Так, если s° || х°, то следует учитывать лишь компоненту µx. Поскольку на практике условие s° || х°, где х° — продольная ось сердечника, почти всегда выполнимо, то с учетом (4-2) и представления s = s°s, где s — число, характеризующее площадь поперечного сечения контура, имеем взамен (4-1):
 . (4-3)
. (4-3)
Таким образом, обобщенный параметр преобразователя является функцией четырех частных параметров: s°, s, µ и N.
В соответствии с законом электромагнитной индукции э. д. с, наводимая в контуре с числом витков ω, будет:

Очевидно, что когда Y = const, мы имеем дело с обычным пассивным преобразованием. Когда же В0 = const, то преобразование возможно лишь за счет изменения параметра Y во времени. В первом случае э. д. с. пропорциональна скорости изменения самого поля; во втором — скорости изменения параметра.
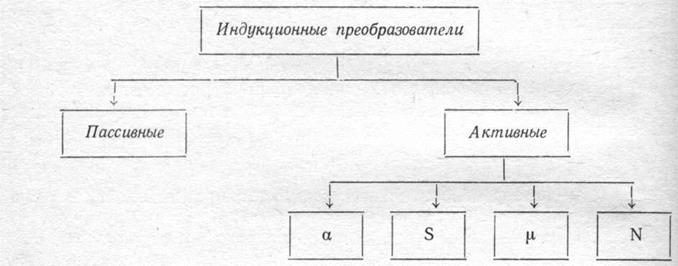
Рис. 4-1. Классификация индукционных преобразователей
Уравнение (4-4) позволяет разделить индукционные преобразователи на две большие группы: пассивные и активные преобразователи, (рис. 4-1).
Второй член уравнения (4-4) можно представить в виде:
 , (4-5)
, (4-5)
где pi= s°, s, µ, N — частный параметр преобразователя. Частные уравнения, отражающие процессы в соответствующих типах активных преобразователей, имеют вид:
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.