С этой точки зрения можно было бы, как это рекомендовал еще Максвелл [1-9], разделить измеряемые величины на скалярные, векторные и тензорные. Однако следует помнить, что непосредственно измеряемыми величинами всегда являются скаляры. Лишено какого-либо смысла деление преобразователей на скалярные, векторные и тензорные. Лишь приборы как некие совокупности измерительных средств по своей информативности могут быть разделены на скаляр и тензор-измерители в том смысле, что с их помощью можно обнаружить данные величины и покомпонентно измерить их.
Все существующие и потенциально возможные преобразователи могут быть объединены в три группы по функциональной связи выходного сигнала с непосредственно измеряемой величиной:
ρ=fI(φ),φ+![]() ;
;
ρ=fII(B),B=|B|;
ρ=fIII(Bi),Bi=B![]() .
.
Здесь ρ — параметр
выходного сигнала (механическое перемещение, электрическое напряжение, частота
колебаний и т. д.); i° — некоторое заданное направление ![]() — магнитная
ось преобразователя.
— магнитная
ось преобразователя.
Объединение различных типов преобразователей в указанные группы позволяет выработать единые критерии для оценки их метрологических, технических и эксплуатационных характеристик. Кроме того, объединение в группы позволяет широко пользоваться методом аналогий, перенося положительный опыт применения одного типа преобразователей на другой.
Часть вторая Основные характеристики
Преобразователей
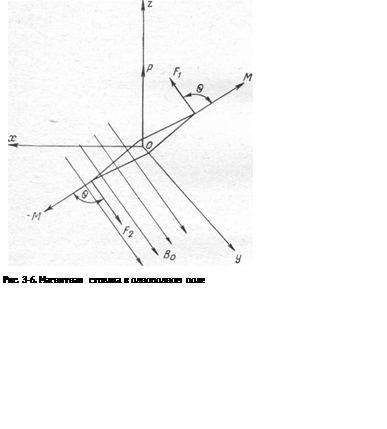
3-3. Взаимодействие с магнитным полем. Чувствительность
Предположим теперь, что механический преобразователь (магнитная стрелка) помещен в однородное поле с магнитной индукцией В0 (рис. 3-6). В этом случае со стороны поля на стрелку будет действовать механический вращающий момент Р=[МВ0] (см. § 1-3) или в скалярной форме записи: Р = МВ0 sin θ, где М — магнитный момент стрелки; θ — угол между векторами М и В0. Момент Р уравновешивается противодействующим моментом Рпр : МВ0 sin θ = Рпр, откуда
θ = arcsin Рпр/МВ0. (3-1)
Преобразователи первой группы стремятся выполнять таким образом, чтобы противодействующий момент был как можно ближе к нулю. Тогда θ ≈ 0, и направление магнитной стрелки практически совпадает с направлением В0. Однако на практике противодействующий момент почти всегда имеет некоторое конечное значение, обусловленное наличием трения, если стрелка расположена на острие иглы, или наличием кручения, если она подвешена на нити. В этом случае угол θ также будет отличен от нуля и равен некоторому углу θ0, значение которого определяет угловую погрешность механических преобразователей, предназначенных для определения направления вектора В0. Наименьшим противодействующим моментом обладают преобразователи, выполненные в виде магнитной стрелки, прикрепленной к поплавку, опущенному в жидкость.
 Рассмотрим теперь условия равновесия в магнитном поле преобразователей
второй группы:
Рассмотрим теперь условия равновесия в магнитном поле преобразователей
второй группы:
1. Магнитная стрелка подвешена на упругой нити. При наличии кручения на нее будет действовать, кроме момента Р = MB0sin θ, противодействующий момент Рпр = сφ, где φ — угол закручивания нити, а с – коэффициент кручения (удельный противодействующий момент). Так как в состоянии равновесия МВ0sinθ=сφ, то угол φ, на который отклоняется стрелка в магнитном поле, равен φ=SB0, где
S = ![]() .
(3-2)
.
(3-2)
Поскольку угол φ является выходной величиной механического преобразователя, то коэффициент S можно рассматривать как его чувствительность к магнитной индукции В0. Как видно из формулы (3-2), чувствительность механического преобразователя зависит от угла θ между осью магнитной стрелки и направлением магнитной индукции В0 и имеет максимальное значение при θ = 90°. Этим обстоятельством обычно пользуются на практике, располагая магнитную стрелку так, чтобы ее магнитная ось была перпендикулярна измеряемой компоненте магнитной индукции.
2. Магнитная стрелка подвешена на растянутых нитях. Пусть при этом центр тяжести расположен таким образом (рис. 3-7), что уравновешивание происходит одновременно за счет силы тяжести и момента кручения нити. В этом случае условие равновесия можно записать так: (MxB0z-MzB0x)=±сφ+Mglcos(β-θ), где B0z, B0x – вертикальная и горизонтальная составляющие магнитной индукции; Мz и Мх — составляющие магнитного момента стрелки по осям z и х; М — масса стрелки; g — ускорение свободного падения; l — расстояние от центра тяжести до оси вращения стрелки.
Заменив проекции магнитного момента Мz и Мх их выражениями через момент М, получим
MB0z cos θ - МВ0x sin θ = ±сφ + Mgl cos β cos θ - Mgl sin β sin θ. (3-3)
Как видно из выражения (3-3), при малых значениях угла θ, т, е. когда магнит расположен горизонтально, членом, содержащим В0x, можно пренебречь и, наоборот, когда магнит расположен вертикально, то можно пренебречь членом, содержащим B0z. Таким образом, подвешивая стрелку в вертикальном или горизонтальном положении, можно производить измерение соответственно горизонтальной или вертикальной составляющей магнитной индукции. Это свойство преобразователей на растянутых нитях и ножевых опорах используется при разработке приборов, получивших название магнитных весов (см. § 8-1).
Определим чувствительность магнитной стрелки, подвешенной вертикально или горизонтально. Для этого продифференцируем выражение (3-3), считая М, с, М, g, l и β величинами постоянными, а φ = θ, и перейдем затем к конечным приращениям:
M∆B0zcosθ – MB0zsinθ∆θ – MB0xsin θ – MB0xcos θ∆ θ =
= ±c∆θ – Mglcosθsinθ – Mglsin θ cos θ
Если магнитная стрелка расположена горизонтально, так что sin θ = 0, a cos θ = 1, то
∆B0z=(![]() )∆θ,
)∆θ,
где zc = lsinβ — расстояние от центра тяжести до оси магнита. Обычно при измерении вертикальной составляющей магнитной индукции магнит располагают так, чтобы его магнитная ось была перпендикулярна Вох. В этом случае чувствительность преобразователя к вертикальной составляющей В0 будет:
Sz=![]() .
.
Если магнитная стрелка расположена вертикально, так что ее ось перпендикулярна B0z, то, проделав те же преобразования, можно получить аналогичную формулу:
Sz=![]() .
.
где хс = l cos β.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.