Очевидно рассматриваемый тип механического преобразователя может быть использован не только для измерения составляющих, но и для измерения модуля магнитной индукции В0. В этом случае магнит необходимо установить так, чтобы его магнитная ось и ось вращения были перпендикулярны направлению вектора В0.
3. В
магнитное поле помещен астатический преобразователь, состоящий из двух
магнитных стрелок, подвешенных на одной и той же упругой нити на расстоянии ∆i. Пусть вектор магнитной индукции В0 изменяется в пространстве как по
модулю, так и по направлению. Тогда на нижнюю стрелку будет действовать
вращающий момент Р'=М![]() sinθ-М
sinθ-М![]() sin(90°-θ), а
на верхнюю — момент P"=-
sin(90°-θ), а
на верхнюю — момент P"=-![]() sinθ+M
sinθ+M![]() sin(90°-θ), где
sin(90°-θ), где ![]() ,
, ![]() ,
, ![]() ,
, ![]() — проекция
векторов
— проекция
векторов ![]() и
и ![]() на координатные оси х и у. (рис. 3-8).
на координатные оси х и у. (рис. 3-8).
Суммарный
вращающий момент, действующий на астатический преобразователь равен: P∑= Р'+Р"= М(![]() -
-![]() )sinθ - М(
)sinθ - М(![]() -
-![]() ) cosθ
= М∆igradz
) cosθ
= М∆igradz ![]() sinθ -
sinθ -
- М∆i
gradz Boy cosθ, где gradz ![]() и gradz Boy – градиенты составляющих Box и Boy по направлению z. Приравняв момент P∑ к
противодействующему моменту Рпр = сφ, получим
и gradz Boy – градиенты составляющих Box и Boy по направлению z. Приравняв момент P∑ к
противодействующему моменту Рпр = сφ, получим
φ= ![]() (∆i M
gradz В0х sin
θ - M∆igradzBoycosθ). (3-4)
(∆i M
gradz В0х sin
θ - M∆igradzBoycosθ). (3-4)
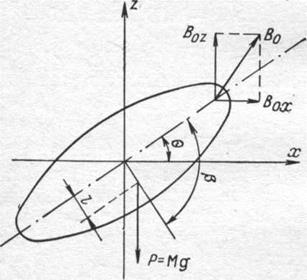
Рис. 3-7. К выводу условия равновесия в магнитном поле механического преобразователя на растянутых нитях
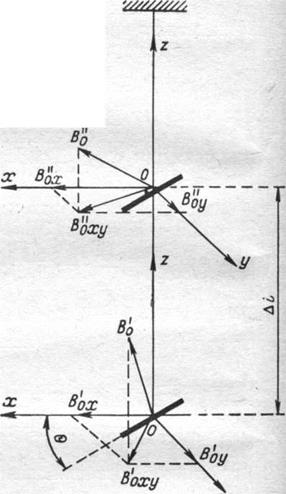
Рис.3-8. Астатический преобразователь в неоднородном магнитном поле
4. Рассмотрим теперь действие на магнитную стрелку магнитного поля, изменяющегося во времени по периодическому закону. Будем считать, что стрелка расположена в горизонтальной плоскости и может совершать лишь вращательные движения вокруг вертикальной оси. Движение стрелки в общем случае описывается известным уравнением
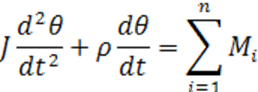
где J - момент
инерции подвижной части преобразователя; ![]() - коэффициент торможения,
- коэффициент торможения, ![]() - сумма всех моментов, действующих на подвижную часть преобразователя.
- сумма всех моментов, действующих на подвижную часть преобразователя.
Поскольку механические преобразователи для измерения магнитной индукции
переменных полей применяются крайне редко (в основном в приборах,
предназначенных для измерения вариаций магнитного поля Земли), то практический
интерес представляет рассмотрение только частного случая, когда на магнитную
стрелку действуют одновременно постоянное поле с магнитной индукцией В0 и переменное
с амплитудой δВ0, причем δВ0 ![]() В0. В этом
случае суммарный момент
В0. В этом
случае суммарный момент
![]() , (3-6)
, (3-6)
где φ —
угол, на который закручена нить; ![]() — угол между магнитной осью
стрелки и направлением вектора В0; θ – изменение этого угла под
действием δВ0; ω – частота
переменной составляющей магнитного поля. Подставляя (3-6) в (3-5), получим
— угол между магнитной осью
стрелки и направлением вектора В0; θ – изменение этого угла под
действием δВ0; ω – частота
переменной составляющей магнитного поля. Подставляя (3-6) в (3-5), получим
![]() .
.
Так как δВ0 ![]() В0, то после
разложения sin (θ0
+ θ) можно положить sinθ
В0, то после
разложения sin (θ0
+ θ) можно положить sinθ ![]() θ, a
cosθ = 1. Тогда последнее уравнение приводится
к виду:
θ, a
cosθ = 1. Тогда последнее уравнение приводится
к виду:
![]()
где 2h = p/J, ![]() = (с + МВ0 cosθ)/J.
= (с + МВ0 cosθ)/J.
Решение полученного уравнения известно:
 , (3-7)
, (3-7)
где
![]()
Первый член уравнения (3-7) представляет собой собственные колебания
магнита, которые при достаточно большом h быстро затухают, второй член —
вынужденные колебания с амплитудой ![]() и начальной фазой
и начальной фазой ![]() . При ω0
. При ω0![]() ω
ω

где ![]() ,
, ![]() , Мх и Му —
составляющие переменной магнитной индукции и магнитного момента по осям х и у. Сомножитель в скобках правой части
выражения (3-8) — есть проекция вектора
, Мх и Му —
составляющие переменной магнитной индукции и магнитного момента по осям х и у. Сомножитель в скобках правой части
выражения (3-8) — есть проекция вектора ![]() на направление, перпендикулярное
магнитному моменту магнита М.
Обозначим ее
на направление, перпендикулярное
магнитному моменту магнита М.
Обозначим ее ![]() . Тогда
. Тогда
![]() (3-9)
(3-9)
Таким
образом, при ω0 ![]() ω магнитометр будет без искажения
регистрировать
ω магнитометр будет без искажения
регистрировать ![]() а коэффициент S будет
являться чувствительностью механического преобразователя к магнитной индукции
в переменном поле.
а коэффициент S будет
являться чувствительностью механического преобразователя к магнитной индукции
в переменном поле.
Так как трудно изготовить механический преобразователь с собственной частотой колебаний больше нескольких герц, то измерение магнитной индукции переменных полей с помощью механических преобразователей производится только в тех случаях, когда частота со не превышает указанной величины.
Чувствительность механических преобразователей к магнитной индукции постоянного поля сравнительно велика и, как мы увидим во второй части книги, позволяет создавать приборы для измерения магнитной индукции с порогом чувствительности порядка единиц нанатесла и меньше.
Порог чувствительности механических преобразователей в ряде случаев определяется нестабильностью нулевого сигнала (погрешностью нуля), под которой подразумевают нестабильность начального угла между магнитной осью преобразователя и соответствующей координатной осью. Случайная составляющая погрешности нуля (аддитивный шум) объясняется наличием тряски и воздушных потоков, возникающих вследствие градиента температуры и воздействующих на магнитную стрелку. С целью уменьшения этих погрешностей механический преобразователь устанавливают на массивном фундаменте и помещают в домик — специальный ящик, одна или две противоположные стенки которого выполняются из стекла. Воздух из домика часто откачивается. Герметизация особенно необходима, если магнит сделан из викаллоя. Викаллоевый магнит после его термообработки покрывается окалиной, которая хорошо впитывает влагу, что приводит к появлению систематической погрешности.
3-5. Использование механических преобразователей для абсолютного и относительного измерения магнитной индукции
Одно из основных достоинств механических преобразователей состоит в возможности использования их для абсолютного измерения модуля В0. Впервые абсолютный метод измерения магнитной индукции был предложен Гауссом [3-5]. Метод Гаусса основан на законах взаимодействия между постоянными магнитами и магнитным полем и заключается в непосредственных измерениях периода качания в горизонтальной плоскости магнита, помещенного в измеряемое поле, и наблюдении угла отклонения другого магнита, вызываемого первым магнитом. Положения, в которых находятся оба магнита (стрелки ns и отклоняющий магнит NS) относительно друг друга, принципиально могут быть любыми, однако для упрощения расчета обычно используют одно из четырех положений, два из которых предложены Гауссом, а два Ламоном (рис. 3-9).
Можно показать [3-6], что соотношения между магнитной индукцией и углом отклонения стрелки 6 имеют вид: для первого гауссова положения
 ; (3-10)
; (3-10)
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.