После каждого дня защиты листы графического материала и расчетно-пояснительной записки защищенных курсовых работ сдаются председателем комиссии под расписку на хранение ответственному на кафедре лаборанту.
Исходные данные для выполнения курсовой работы включают в себя принципиальную электрическую схему исходной САУ, таблицу параметров линейной, нелинейной частей системы и входных сигналов, а также требуемых показателей качества. Заметим, что для большинства студентов принципиальная электрическая схема системы выдается в качестве задания еще при выполнении курсовой работы по курсу «Теоретические основы кибернетики», где студент переходит от содержательного описания процессов в системе к ее формальной математической модели.
Вопросы классификации исходной САУ рассматривались в рамках практических занятий в первой части курса, где та же принципиальная электрическая схема была исходной при выполнении домашних заданий. Поэтому в значительной мере задача настоящего анализа состоит в обобщении полученных ранее результатов. Очень важно определить класс САУ, к которой относится исходная система, для чего следует, исходя из содержательного описания, выяснить принцип организации управления, характер основных воздействий на систему, возможные режимы.
Пример.
Пусть требуется перейти от содержательного описания принципиальной
электрической схемы САР скорости вращения измельчительного агрегата(рис.1).
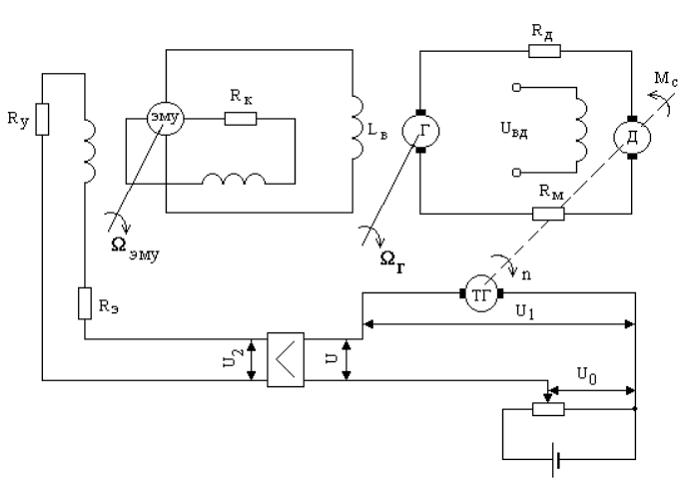
Рис. 1 Принципиальная электрическая схема САР скорости вращения измельчительного агрегата.
Функциональная схема такой САР содержит следующие функционалъные элементы (рис. 2):
- собственно объект управления - двигатель постоянного тока (Дв), управляемый по якорной цепи;
- усилительно-преобразовательные элементы - электромашинный усилитель (ЭМУ) и генератор (Г);
-суммирующий элемент, которым является электронный усилитель (У);
-измерительное устройство - тахогенератор (ТГ).
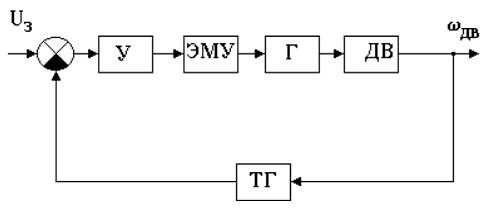
Рис.2 Функциональная схема САР регулирования скорости вращения измельчительного агрегата.
Очевидно, цель системы - поддерживать с определенным качеством заданную технологическим регламентом скорость вращения измельчительного агрегата. Следовательно, в течение некоторого промежутка времени задающий (управляющий) сигнал на входе системы - величина постоянная. Величина момента сопротивления на валу двигателя зависит от степени заполнения рудой измельчительного агрегата и является для системы регулирования возмущающим воздействием. Предполагается, что скорость приводных двигателей ЭМУ и Г, а также напряжение на обмотках возбуждения двигателя и тахогенератора величины постоянные. Кроме того, заметим, что параметры функциональных элементов системы также постоянны во времени. Из функциональной схемы и типа входного сигнала можно сделать вывод, что система управления скоростью приводного двигателя организована по замкнутому циклу на основе отрицательной обратной связи и в классе обычных систем относится к системам автоматической стабилизации. Стационарность свойств системы во времени, ее одномерность показывает, что ее расчет не вызывает затруднений и может быть проведен методами классической теории управления, которые для простых одномерных стационарных систем доведены до инженерных.
При этом очень важно исследовать возможность описания системы линейной моделью, что позволяет существенно упростить расчеты, так как теория линейных стационарных САР разработана наиболее полно, имеет практически законченный вид.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.