а) временем
переходного процесса ![]() (рис. 12 ),
которое определяется как интервал времени от начала
переходного процесса до
момента вхождения
процесса в пятипроцентную зону;
(рис. 12 ),
которое определяется как интервал времени от начала
переходного процесса до
момента вхождения
процесса в пятипроцентную зону;
б) временем установления ![]() ;
;
в) максимальным перерегулированием
 ;
;
г) числом колебаний ![]() за время переходного
процесса;
за время переходного
процесса;
д) частотой колебаний  .
.
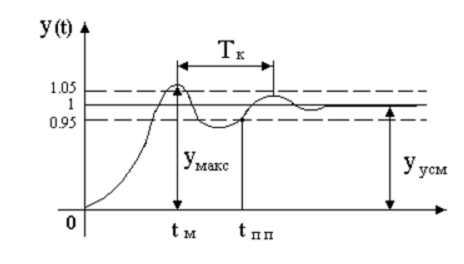
Рис. 12. Показатели качества переходного процесса
При синтезе систем
частотными методами о качестве переходного процесса судят
по величине вещественной характеристики замкнутой системы ![]() . При этом
оказывается, что время переходного процесса,
перерегулирование и другие показатели качества тесно связаны с
параметрами среднечастотной
части желаемой ЛАХ.
. При этом
оказывается, что время переходного процесса,
перерегулирование и другие показатели качества тесно связаны с
параметрами среднечастотной
части желаемой ЛАХ.
Таким образом, чтобы обеспечить требуемые показатели качества переходного процесса, необходимо правильно выбрать параметры среднечастотной части желаемой ЛАХ, которые определяют также и устойчивость системы. Высокочастотная часть желаемой ЛАХ существенного влияния на показатели качества не оказывает, поэтому ее параметры выбираются исходя из простоты коррекции и требуемой мощности исполнительного устройства.
В работах [5, 8, 9] приведены различные типы желаемых ЛАХ для статических и астатических систем. Однако наиболее часто используются ЛАХ, приведенные в табл. 3.
Для всех желаемых ЛАХ характерно, что они пересекают ось нуля децибелл под единичным наклоном -20дБ/дек. Это необходимо для обеспечения устойчивости системы.
Методика формирования желаемой ЛАХ определяется характером задающих воздействий и требуемыми показателями качества. По этим признакам все варианты заданий сводятся к трем типам:
1. Заданы
параметры гармонического воздействия, максимальная
допустимая ошибка ![]() и показатель колебательности
и показатель колебательности ![]() .
.
2.
Заданы воздействие в
виде скачка, допустимая ошибка (или коэффициенты ошибок), время
переходного процесса ![]() и максимальное
перерегулирование
и максимальное
перерегулирование ![]() .
.
3. Заданы скорость и ускорение медленно меняющегося сигнала, соответствующие составляющие ошибки и запас устойчивости по фазе.
Первый тип задания предполагает использование методики расчета Бесекерского В. А. [6] , второй - В.В.Солодовникова [ 7], третий - Е.А.Санковского [8].
Так как между показателями качества существует определенная связь, то можно переходить от одного вида задания к другому и использовать при формировании желаемой ЛАХ различные, а иногда и комбинированные методы. Отметим, что расчёт по методике Бесекерского В. А. гарантирует хорошую работу системы при любых входных воздействиях, максимальная скорость и ускорение которых не превосходят соответствующих максимальных параметров, заданных в расчете. Поэтому эта методика может рассматриваться как основная, тем более, что ее использование обеспечивает, как правило, наиболее простую реализацию корректирующих устройств.
Таблица 3.
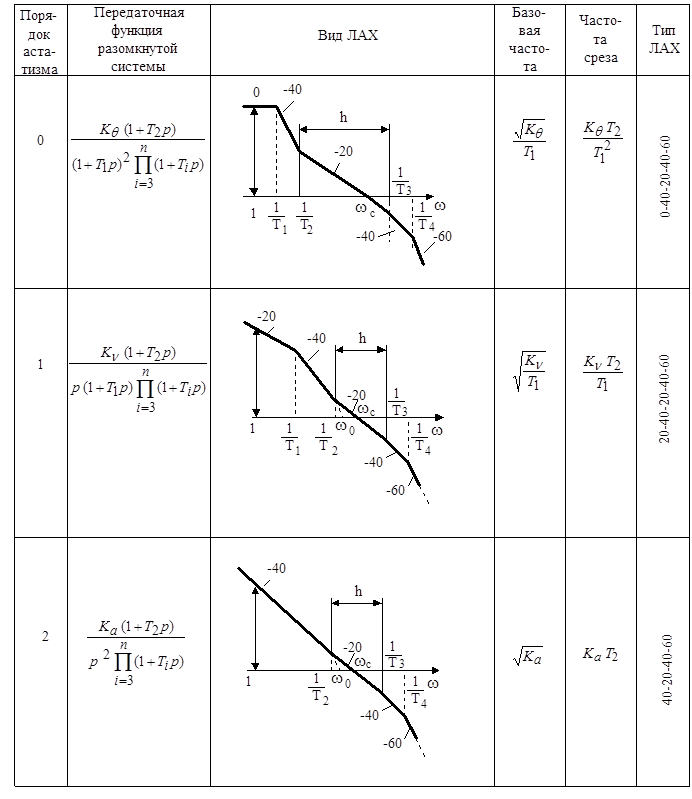
Формирование желаемой ЛАХ по любой методике производится в три этапа: для низкого, среднего и высокочастотного диапазонов.
Методика В.А.Бесекерского (первый тип задания)
Для
построения низкочастотной части желаемой ЛАХ по этому методу
необходимо выбрать коэффициент усиления разомкнутой системы и первую
постоянную времени ![]() так, чтобы вложиться в величину допустимой
максимальной ошибки
так, чтобы вложиться в величину допустимой
максимальной ошибки ![]() . Формулы для определения параметров низкочастотной части желаемой ЛАХ типовых
позиционных следящих систем приведены в табл. 4.
. Формулы для определения параметров низкочастотной части желаемой ЛАХ типовых
позиционных следящих систем приведены в табл. 4.
Таблица 4
|
Воздействие |
Тип системы |
||
|
статическая |
астатическая 1-го порядка |
астатическая 2-го порядка |
|
|
|
|
|
|
Можно также построить запретную зону,
в которую не должна попадать желаемая ЛАХ, чтобы система имела нужную точность. Для этого (рис. 13) на частоте воздействия откладывают величину  и через
полученную точку
и через
полученную точку ![]() проводят две прямые с наклоном -20 дБ/дек и -40 дБ/дек. Желаемая ЛАХ должна лежать не ниже полученной заштрихованной запретной области
.(обычно проводят на
3 дБ выше запретной зоны).
проводят две прямые с наклоном -20 дБ/дек и -40 дБ/дек. Желаемая ЛАХ должна лежать не ниже полученной заштрихованной запретной области
.(обычно проводят на
3 дБ выше запретной зоны).

Рис. 13. Формирование низкочастотной части желаемой ЛАХ
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.