от величины
максимального пика ВЧХ![]() , т.е. графиками
, т.е. графиками![]() и
и ![]() (Рис. 16 ) [ 7]. Из этих графиков
по заданным величинам
(Рис. 16 ) [ 7]. Из этих графиков
по заданным величинам ![]() и
и ![]() определяем частоту среза желаемой ЛАХ:
определяем частоту среза желаемой ЛАХ:
 (2.10)
(2.10)
и величину ![]() . Значение минимума ВЧХ принимаем
. Значение минимума ВЧХ принимаем
![]() . (2.11)
. (2.11)
Если, например, задано ![]() и
и ![]() , то из
рис. 16 и уравнений (2.10) и (2.11) находим
, то из
рис. 16 и уравнений (2.10) и (2.11) находим ![]() ;
;
![]() ;
;  .
.
Для того чтобы выполнялось
условие ![]() , необходимо на номограмме для
, необходимо на номограмме для ![]() (рис. 17) построить запретную область в виде
прямоугольника, стороны
которого являются касательными
к кривым с индексами
(рис. 17) построить запретную область в виде
прямоугольника, стороны
которого являются касательными
к кривым с индексами ![]() и
и ![]() . Из запретной зоны легко определить требуемые превышения, по модулю
. Из запретной зоны легко определить требуемые превышения, по модулю ![]() и
и ![]() и
запасы по фазе
и
запасы по фазе ![]() и
и
![]() .
.
Так, при ![]() =1.2
и
=1.2
и ![]() =--0,2
находим
=--0,2
находим ![]() =15дБ,
=15дБ, ![]() =-15дБ;
=-15дБ;![]() . Откладывая на оси частот полученную по уравнению
(2.10) величину
. Откладывая на оси частот полученную по уравнению
(2.10) величину ![]() для
желаемой ЛАХ, проводим через эту точку прямую с
наклоном -20 дБ/дек. Протяженность этой прямой
для
желаемой ЛАХ, проводим через эту точку прямую с
наклоном -20 дБ/дек. Протяженность этой прямой ![]() занимает диапазон частот, в котором выполняется
условие
занимает диапазон частот, в котором выполняется
условие ![]() . Сопряжение среднечастотной части желаемой
ЛАХ с низкочастотной
и высокочастотной частью неизменяемой ЛАХ выполняется прямыми, наклоны
которых отличаются как можно меньше от соответствующих наклонов неизменяемой ЛАХ.
При этом корректирующие
устройства получаются наиболее простыми.
. Сопряжение среднечастотной части желаемой
ЛАХ с низкочастотной
и высокочастотной частью неизменяемой ЛАХ выполняется прямыми, наклоны
которых отличаются как можно меньше от соответствующих наклонов неизменяемой ЛАХ.
При этом корректирующие
устройства получаются наиболее простыми.
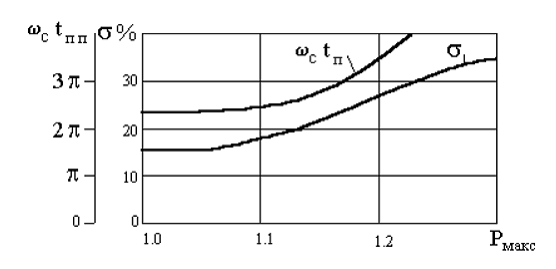
Рис. 16. Зависимость перерегулирования и относительного времени переходного процесса от максимального значения ВЧХ замкнутой системы.
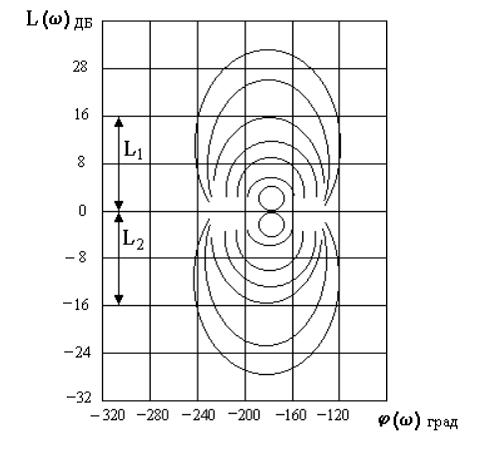
Рис. 17. Номограммы для определения запасов по модулю и фазы.
Пример 2.
Задана передаточная функция разомкнутой нескорректированной следящей системы:
 .
.
Сформировать желаемую ЛАХ, если известно, что максимальная ошибка![]() не должна превышать
не должна превышать ![]() при скорости вращения задающей оси
при скорости вращения задающей оси ![]() =18 град/с. Момент сопротивления нагрузки
=18 град/с. Момент сопротивления нагрузки ![]() = 4 104
г.см, передаточное число
редуктора
= 4 104
г.см, передаточное число
редуктора ![]() =100, жесткостъ механических
характеристик двигателя
=100, жесткостъ механических
характеристик двигателя
![]() =2 г.см.с/град, время переходного процесса
=2 г.см.с/град, время переходного процесса ![]() , перерегулирование
, перерегулирование ![]() .
.
Решение.
1. Из табл. 6 определим требуемый коэффициент усиления разомкнутой системы, обеспечивающий заданную точность в установившемся режиме:
 .
.
2.
Построим ЛАХ нескорректированной исходной
системы, для чего на частоте ![]() отложим
отложим ![]() и проведем через эту
точку асимптоту с наклоном -20 дБ/дек до первой сопряженной
частоты
и проведем через эту
точку асимптоту с наклоном -20 дБ/дек до первой сопряженной
частоты , затем прямую с наклоном -40дБ/дек до следующей сопряженной частоты
, затем прямую с наклоном -40дБ/дек до следующей сопряженной частоты , изменим наклон на -60дБ/дек и, наконец, с
частоты
, изменим наклон на -60дБ/дек и, наконец, с
частоты  проводим высокочастотную асимптоту с наклоном -80 дБ/дек.
проводим высокочастотную асимптоту с наклоном -80 дБ/дек.
Таким образом, ЛАХ исходной системы ![]() имеет вид 1-2-3-4 (рис. 18 ).
имеет вид 1-2-3-4 (рис. 18 ).
3.Построим желаемую ЛАХ. Для этого по графикам рис. 16 находим ![]() =1.2;
=1.2; ![]() =-0.2;
=-0.2;  ,а по номограмме
рис.17 определяем
,а по номограмме
рис.17 определяем ![]() =15
дБ,
=15
дБ, ![]() =-15 дБ. Исходя из простоты корректирующего устройства уменьшаем
=-15 дБ. Исходя из простоты корректирующего устройства уменьшаем ![]() до -12дБ. Среднечастотную часть желаемой ЛАХ строим в виде
прямой с наклоном -20 дБ/дек,
проходящей через точку
до -12дБ. Среднечастотную часть желаемой ЛАХ строим в виде
прямой с наклоном -20 дБ/дек,
проходящей через точку ![]() и расположенной в диапазоне
частот от
и расположенной в диапазоне
частот от![]() до
до![]() . В низкочастотной части сопряжение
. В низкочастотной части сопряжение ![]() и
и ![]() осуществим прямой с наклоном -40дБ/дек. В
высокочастотной части, начиная с частоты
осуществим прямой с наклоном -40дБ/дек. В
высокочастотной части, начиная с частоты ![]() ,
,
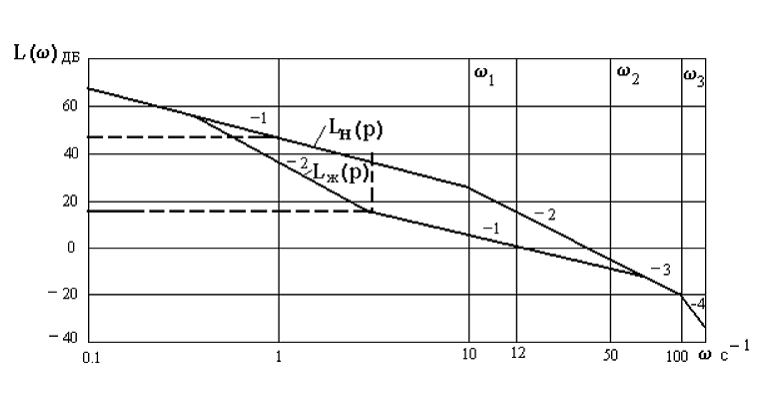
Рис. 18. Формирование желаемой ЛАХ по методу Солодовникова.
ЛАХ желаемой САР совпадает с ЛАХ исходной системы.
3. Методика Е. А. Санковского (третий тип задания)
По этой методике желаемые ЛАХ характеризуются
отношением наклонов второй низкочастотной асимптоты и первой ![]() и
вводят в рассмотрение параметр
и
вводят в рассмотрение параметр
 .
.
Для самой распространенной желаемой ЛАХ (тип - -2/1) получают следующие соотношения:
 ;
;  ;
;
 ;
;  , которые позволяют полностью сформировать желаемую
ЛАХ. Подробные примеры на построение желаемой ЛАХ
по этой методике приведены в [8].
, которые позволяют полностью сформировать желаемую
ЛАХ. Подробные примеры на построение желаемой ЛАХ
по этой методике приведены в [8].
Учет воздействия помех
В некоторых
вариантах курсового проекта в качестве исходных данных
задаются спектральная плотность широкополосной помехи типа белый шум ![]() и дисперсия допустимой флюктуационной
ошибки
и дисперсия допустимой флюктуационной
ошибки ![]() . Эти требования,
необходимо учитывать при формировании желаемой ЛАХ.
. Эти требования,
необходимо учитывать при формировании желаемой ЛАХ.
Вычисляя допустимую
полосу шумов по выражению  и используя приближенное
соотношение
и используя приближенное
соотношение
![]()
или
 , определяют предельное верхнее значение
частоты среза
, определяют предельное верхнее значение
частоты среза ![]() .
.
Если ограничена полная среднеквадратическая ошибка системы, то следует иметь в виду, что
![]() , где
, где ![]() - динамическая
ошибка.
- динамическая
ошибка.
Выбор способа включения корректирующего устройства
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.