Корни ![]() полинома
полинома ![]() есть
собственные значения матрицы
есть
собственные значения матрицы ![]() .
.
Пусть ![]() .
.
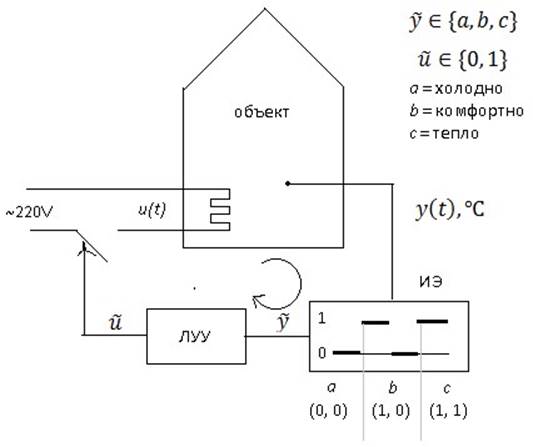
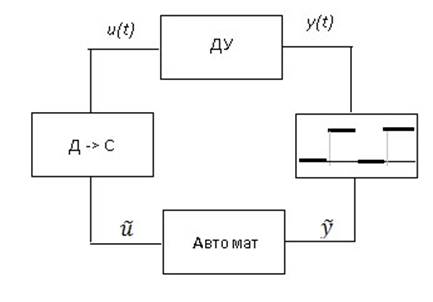
где ЛУУ – логическое управляющее устройство
Объект описывается дифференциальными уравнениями.
ЛУУ описывается при помощи конечного асинхронного автомата.
ИЭ – пороговое устройство
Конечный автомат ![]() есть:
есть:
![]()
где ![]() – входной алфавит;
– входной алфавит; ![]() – множество состояний;
– множество состояний; ![]() - начальное состояние;
- начальное состояние; ![]() – выходной алфавит;
– выходной алфавит; ![]() - функция переходов;
- функция переходов; ![]() - функция выходов.
- функция выходов.
Автомат Мили:
Автомат Мура:
![]()
![]()
![]()
В примере с термостатом: ![]() ;
; ![]() ;
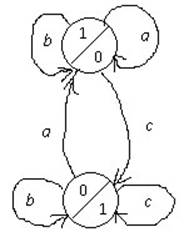
; ![]() .
.

Граф автомата Мура («консервативная тактика»):
Кодирование модели (MATLAB/Simulink).
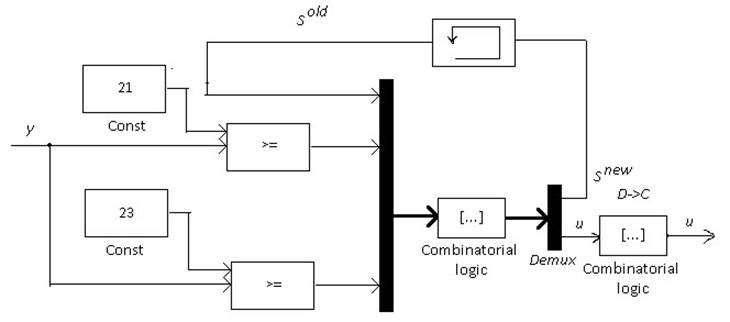
Кодирование графа:
|
RI |
|
|
|
|
u |
U, В |
|
5 |
1 |
0 |
0 |
1 |
0 |
0 |
|
7 |
1 |
1 |
0 |
1 |
0 |
0 |
|
8 |
1 |
1 |
1 |
0 |
1 |
220 |
|
1 |
0 |
0 |
0 |
1 |
0 |
0 |
|
3 |
0 |
1 |
0 |
0 |
1 |
220 |
|
4 |
0 |
1 |
1 |
0 |
1 |
220 |
RI = биты ![]() ,
,
![]() ,
, ![]() переведённые
в десятичное число и сложенные с единицей (блок Combinatorial Logic).
переведённые
в десятичное число и сложенные с единицей (блок Combinatorial Logic).
1. Основные понятия теории управления.
2. Поведение объектов и систем управления.
3. Информация и принципы управления.
4. Способы кодирования информации в системах управления.
5. Типовые алгоритмы принятия решений.
6. Энергетический аспект управления.
7. Математические модели сигналов и систем.
8. Способы построения математических моделей.
9. Линейные модели систем управления. Дифференциальные уравнения и передаточные функции.
10. Линейные модели систем управления. Временные и частотные характеристики.
11. Построение временных характеристик классическим методом.
12. Построение временных характеристик операторным методом.
13. Построение частотных характеристик аналитическим способом.
14. Модели "вход-состояние-выход". Форма пространства состояний.
15. Анализ устойчивости.
16. Критерий устойчивости Гурвица.
17. Критерий устойчивости Михайлова.
18. Устойчивость типовых соединенйи звеньев.
19. Частотный критерий Найкниста.
20. Устойчивость систем с произвольной структурой.
21. Формула Мейсона для сигнального графа.
22. Построение структурированных моделей (задача реализации).
23. Анализ качества процессов. Прямые показатели качества.
24. Косвенные показатели качества. Корневые и частотные показатели.
25. Интегральный квадратичный показатель качества.
26. "Улучшенный" интегральный квадратичный показатель качества.
27. Синтез систем управления. Стабилизация неустойчивых объектов операторным методом.
28. Синтез систем управления. Стабилизация неустойчивых объектов методом пространства состояний.
29. Наблюдатель состояния.
30. Системы цифрового управления.
31. Разностные уравнения.
32. Анализ дискретных систем. Решение разностных уравнений.
33. Устойчивость дискретных систем.
34. Однородные модели систем цифрового управления.
35. Выбор частоты дискретизации сигнала.
36. Гибридные модели релейных систем управления.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.