Используем формулу обратного преобразования Лапласа:

Поменяем порядок интегрирования:

Используем формулу для ![]() :
:
Формула Парсеваля:

Где ![]() – энергия процесса.
– энергия процесса.
Пусть n – порядок системы.


![]()
![]() Задана система:
Задана система:
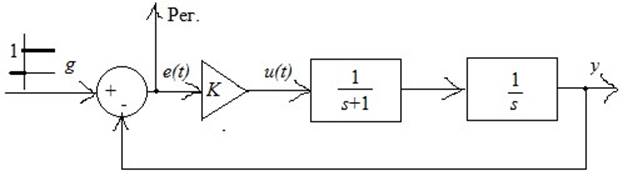
Требуется определить параметр k.
Решение:
Запишем передаточную функцию разомкнутой системы:
![]()
Запишем передаточную функцию замкнутой системы по ошибке:
Знаменатель ![]() есть характеристический
полином замкнутой системы.
есть характеристический
полином замкнутой системы.
Условие устойчивости: для
устойчивости системы требуется, чтобы все коэффициенты характеристического
полинома замкнутой системы были положительными, поэтому ![]() (необходимое
условие устойчивости).
(необходимое
условие устойчивости).
Для ![]() условие
условие ![]() является
и достаточным.
является
и достаточным.
![]()
Рассмотрим корневые показатели качества.
Запишем ещё раз характеристический полином замкнутой системы и вычислим его корни:
Построим годограф корней в зависимости от k:
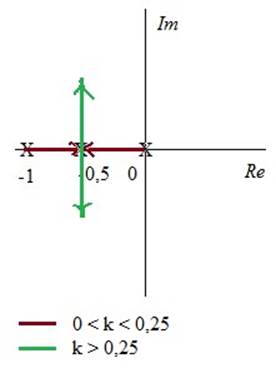
![]()
![]() - с ростом k растёт
частота.
- с ростом k растёт
частота.
![]() , если огибающая
, если огибающая ![]() есть
есть ![]()
Таким образом, ![]() достаточно просто
вычисляется, однако, его минимизация приводит к сильно колебательным системам,
что создаёт трудности на практике.
достаточно просто
вычисляется, однако, его минимизация приводит к сильно колебательным системам,
что создаёт трудности на практике.
Из-за большой крутизны
кривых сильно колебательных систем значения ![]() больше,
чем у слабо колебательных систем.
больше,
чем у слабо колебательных систем.
«Улучшим» интегральный квадратичный показатель:

где ![]() - весовой коэффициент.
- весовой коэффициент.

Какая функция ![]() доставляет минимум
функционалу
доставляет минимум
функционалу ![]() ? Это задача вариационного
исчисления.
? Это задача вариационного
исчисления.
Выделим полный квадрат в подынтеральном выражении:

Упростим второй интеграл
(с учётом ![]() ,
, ![]() в силу
устойчивости системы
в силу
устойчивости системы ![]() ):
):

Получили:
Пусть ![]() . Тогда
. Тогда ![]() должна
быть решением уравнения
должна
быть решением уравнения
Получили
![]()
![]() – постоянная времени.
– постоянная времени.
Таким образом,
формализация требований к качеству процессов связаны с выбором постоянной
времени ![]() .
.
Ограничим и ускорение процесса при помощи критерия (![]() ):
):

Найдём ![]() - минимум функционала
- минимум функционала ![]() .
.
![]() – решение ДУ
– решение ДУ
Если дифференциальное уравнение системы представлено в форме пространства состояний
Требуется синтезировать регулятор состояния, выбрав K.
Критерий без ограничений по управлению:
где Q – положительноопределённая матрица.
Критерий с ограничениями по управлению:

где Q – положительноопределённая матрица.
Синтез
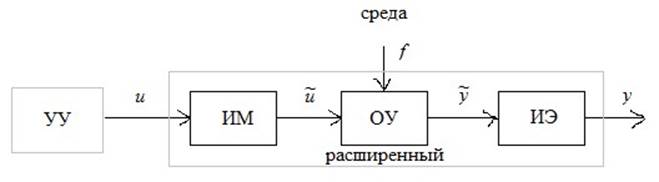
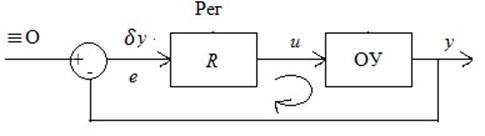
Пусть дан объект управления, находящийся под воздействием среды:
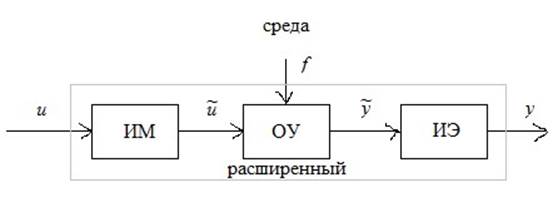
![]() – сигналы-носители
информации, ОУ – обрабатывает информацию.
– сигналы-носители
информации, ОУ – обрабатывает информацию.
Пусть даны:
• Математическая модель ОУ (например, в виде дифференциальных уравнений).
• Модель среды.
• Требования / пожелания («модель проектировщика»).
Ограничения:
• Динамические свойства, характеристики ОУ.
• Управляющие воздействия.
• Ограничения на переменные.
Пусть задана программа ![]() . Найти
. Найти ![]() ,
где
,
где ![]() - множество допустимых
управлений.
- множество допустимых
управлений.
В статическом случае ![]() или
или ![]() . Если
задано
. Если
задано ![]() , то можно найти
, то можно найти ![]() , решив уравнение.
, решив уравнение.
В динамическом случае ![]() , причём множество
, причём множество ![]() ищется отдельно.
ищется отдельно.
Пусть дан объект без самовыравнивания:
Для простоты рассмотрим линейную математическую модель. Пусть дано дифференциальное уравнение в операторной форме:
![]()
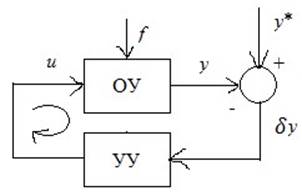
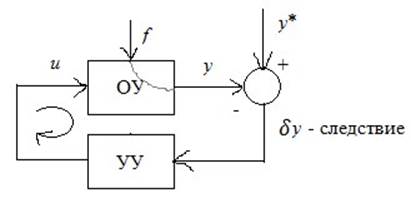
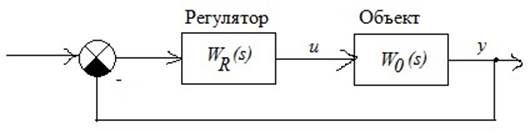
Анализ корней характеристического полинома показал, что существует неустойчивые корни или корни «левые», но с плохими показателями (например, процессы сильно колебательные). Необходимым условием изменения динамики является охват объекта обратной связью, т.е. построение замкнутой системы:
Искомое дифференциальное уравнение регулятора имеет вид:
![]()
Передаточная функция регулятора имеет вид:
Передаточная функция разомкнутой системы:
Задана система управления
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.