Залежно від вигляду R(p) ланка може реагувати: на саму величину; тільки на похідну від вхідної величини; на інтеграл від вхідної величини; на вхідну величину та її похідну; на вхідну величину та інтеграл від неї; на вхідну величину, похідну та інтеграл від неї; та на інші варіанти вхідних дій.
Крім типових ланок в системі іноді зустрічаються особливі ланки: трансцендентні, ірраціональні, немінімально-фазові та інші, особливості та характеристики яких також треба знати.
Для вирішення задач цього підрозділу рекомендується використати матеріал: [1]-с.60-77; [2]-с.55-58, 65-69, 92-122; [3]-с.17-24;[4]-с.20-24, 37-51;[9]-с.72-108;[10]-с.19-24; [11]-с.35-45.
1.6.1 Побутувати часову характеристику h(t) інтегруючої ланки з сповільненням, передатна функція якої має вигляд
Розв’язання
Згідно з (1.95)
Для визначення h(t) використаємо [3]-табл.А2 відповідності зображень Лапласа оригіналам.
В таблиці А2 відсутня функція F(p), що відповідає виразу (1.97). Тоді зробить перетворення Н(p) на прості дроби, записуючі вираз (1.97) у вигляді
 .
.
Після знаходження![]() ,
,![]() і
і ![]() маємо
маємо

Згідно з таблиці А2
![]()
![]()

де 
Отже, підсумкова перехідна функція

або
Змінюючи t від 0 до![]() ,
тобто від 0 до 1,6 С, будуємо h(t).
,
тобто від 0 до 1,6 С, будуємо h(t).
Підсумкова перехідна функція наведена на рисунку 1.22.
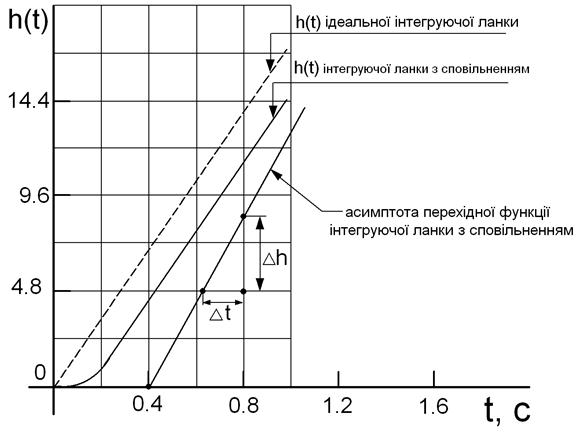
Рисунок 1.22 ‑ Підсумкова перехідна функція
При ![]() вираз (1.104)
перетворюється в вираз
вираз (1.104)
перетворюється в вираз
![]()
і є виразом асимптоти перехідної функції - ![]()
По рисунку 1.22 можна вирішити і зворотну задачу, тобто знайти тип і передаткову функцію типової ланки.
Вираз (1.105) дає можливість визначити параметри передаткової функції і тип ланки.
Із рисунка 1.22 параметри мають такі значення:
При ![]()
![]() - перехідна функція ідеальної
інтегруючої ланки з
- перехідна функція ідеальної
інтегруючої ланки з 
Наявність сталої часу ![]() на
рисунку 1.22 вказує на присутність аперіодичної ланки першого порядку з
на
рисунку 1.22 вказує на присутність аперіодичної ланки першого порядку з 
Тоді підсумкова передаткову функція ланки матиме вигляд

Таким чином, зворотна задача вирішена.
1.6.2 Побудувати часову характеристику h(t) для реальної (з сповільненням) диференційної ланки, якщо k=100 c;
T=0,25 c.
1.6.3 Побудувати часову характеристику h(t)
коливальної ланки з передатною функцією  Рекомендується
використати [1]-c.64, де наведені відповідні вирази для побудови h(t).
Рекомендується
використати [1]-c.64, де наведені відповідні вирази для побудови h(t).
1.6.4 Побудувати часову характеристику h(t) пружної
ланки з такою передатною функцією  коли
коли ![]() а також для варіанту, коли
а також для варіанту, коли ![]() Рекомендується використати [3]‑ таблиці
А2.
Рекомендується використати [3]‑ таблиці
А2.
1.6.5 Задані дві динамічні ланки з передатними функціями
 і
і 
Докажіть, яка з ланок “1” чи “2” має більшу за абсолютною величиною фазу. Доказ проведіть за допомогою частотних характеристик: амплітудно-фазової, та фазочастотної. Як зветься динамічна ланка, що має більшу за величиною фазу.
1.6.6 Розрахуйте та побудуйте амплітудно-фазові
характеристики динамічної ланки з передатною функцією  для
випадків:
для
випадків:
а) ![]()
б) ![]()
За допомогою АФХ для розглянутих випадків знайдіть максимальний
фазовий зсув, що вноситься ланкою в систему. Поясніть, які властивості має
ланка при ![]() і
і ![]() та
як її можна використати.
та
як її можна використати.
Розв’язання.
Вирази для побудови АФХ і ФЧХ мають вигляд

![]()
Відповідно для випадків:
а) 
При
![]()
![]()
![]()
![]()
![]()
![]()
![]() - фазовий зсув позитивний.
- фазовий зсув позитивний.
б)
При
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]() - фазовий зсув
негативний.
- фазовий зсув
негативний.
Динамічна ланка у випадку а) діє з перевагою властивостей диференційної ланки, а у випадку б) – з перевагою властивостей інтегруючої ланки, тому цю динамічну ланку називають пружною.
Амплітудно-фазова характеристика пружної ланки наведена на рисунку 1.23.
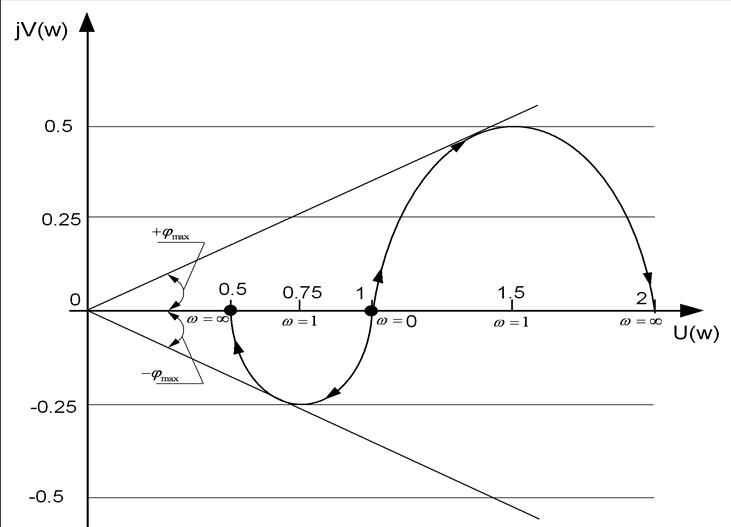
Рисунок 1.23 ‑ Амплітудно-фазова характеристика пружної ланки
Пружні типові ланки використовують в якості корегуючих ланок при стабілізації нестійких систем, а також з метою підвищення якості систем.
1.6.7 Записати передатну функцію і побудувати ЛАЧХ і ЛФЧХ
корегуючої ланки, схема якої наведена на рис. 1.24, без урахування навантаження
![]() і з його урахуванням. Зробити
висновки щодо впливу опору навантаження.
і з його урахуванням. Зробити
висновки щодо впливу опору навантаження.
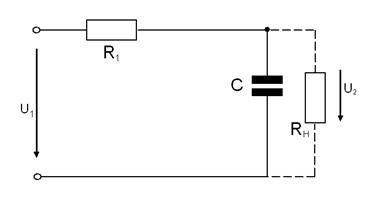
Рисунок 1.6.3 ‑ Принципова схема корегуючої ланки
2. СТІЙКІСТЬ ЛІШІЙНИХ НЕПЕРЕРВНИХ САК
(МОДУЛЬ 2)
2.1 Практичні заняття 7 і 8
Методичні вказівки
Під стійкістю системи автоматичного керування розуміють її властивість повертання в початкове (або близьке до того) положення після закінчення дії факторів (збуджень), які вивели систему із стану початкової рівноваги. Стійкість системи є необхідною умовою можливостей САК вирішувати поставлені перед нею завдання.
Причинами нестійкості системи є:
‑інерційність елементів;
‑великий коефіцієнт підсилення розімкненої системи;
‑структурна нестійкість.
Задачі, які розв’язують при аналізі стійкості, це:
‑оцінка стійкості САК при заданих параметрах;
‑визначення запасів стійкості;
‑визначення допустимого за умови стійкості діапазону змінення деяких незаданих параметрів систем;
‑з’ясування питання, чи може система при заданій структурі в принципі бути стійкою.
Перші дві задачі вирішуються за допомогою критеріїв стійкості, третя – побудовою зон стійкості; четверта – перевіркою умов структурної стійкості.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.