Результат (3.8) по методу помилок збігається з результатом по теоремі операційного числення про кінцеве значення оригіналу (3.6).
Коефіцієнти помилок можна визначити також другим способом (по формулам), а саме:
 (3.9)
(3.9)
 (3.10)
(3.10)
Наприклад

Через коефіцієнти помилок можна визначити коефіцієнти добротностей системи, а саме
 (3.11)
(3.11)
У нашому випадку
 (3.12)
(3.12)
Аналізуючи (3.12) можна зробити такий висновок:
добротність системи у сталому режимі прямо пропорційна коефіцієнту підсилення тих ланок, які розташовані між помилкою (вихід системи) зовнішніми діями (вхід системи) по негативному зворотному зв’язку.
3.1.2 Передатна функція розімкненої системи має вигляд
 (3.13)
(3.13)
де ![]()
Необхідно за допомогою ДЧХ замкненої системи визначити показники
якості процесу керування в перехідному і сталому режимах роботи системи, якщо ![]()
Розв’язання.
Вирішуємо задачу в такий послідовності:
‑ визначаємо передатну функцію ![]() замкненої
системи
замкненої
системи
 (3.14)
(3.14)
‑ записуємо по (3.14) вираз для комплексної передаткової функції
![]()
 (3.15)
(3.15)
‑ виділяємо дійсну частотну характеристику ![]() помножуючи чисельник і знаменник
виразу (3.15) на вираз, спряжений знаменнику.
помножуючи чисельник і знаменник
виразу (3.15) на вираз, спряжений знаменнику.

![]() (3.16)
(3.16)
де
 (3.17)
(3.17)
По виразу для ![]() будемо ДЧХ і по
ній визначаємо необхідні показники якості процесу керування.
будемо ДЧХ і по
ній визначаємо необхідні показники якості процесу керування.
Дані для побудови ДЧХ наведені в таблиці 3.1, а саме характеристика на рисунку 3.2
Таблиця 3.1 – Дані для побудови ДЧХ
|
|
0 |
1 |
2 |
3 |
4 |
6 |
8 |
10 |
15 |
20 |
25 |
|
|
1 |
1,02 |
1,19 |
1,24 |
1,26 |
1,23 |
0,92 |
0,5 |
-0,15 |
-0,27 |
-0,24 |
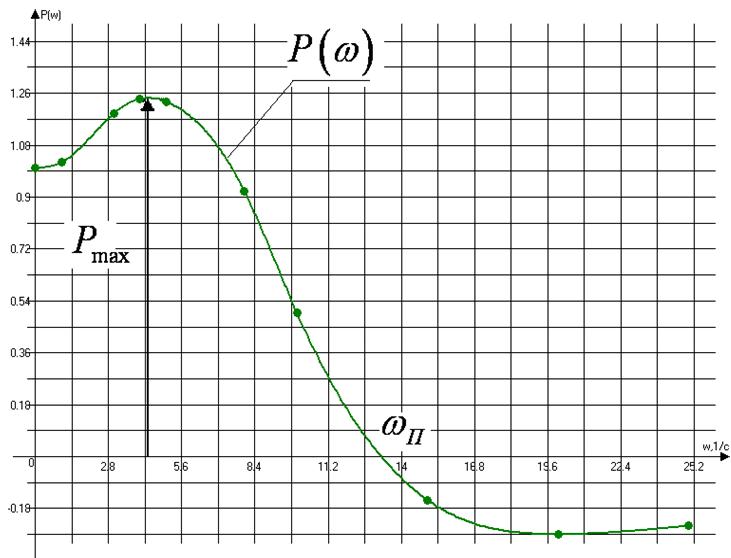
Рисунок 3.2 – ДЧХ замкненої системи
По рисунку 3.2 ‑ визначаємо основні показники перехідного
процесу:
‑ максимальне перерегулювання

 (3.18)
(3.18)
‑тривалість перехідного процесу ‑
 (3.19)
(3.19)
де 
Тривалість перехідного процесу буде більш наближена до позначки 1,6с, тому що коливальний процес має відносно велике перерегулювання, тобто малу ступінь затухання.
Значення ![]() вказує на те, що
коефіцієнт статичної помилки
вказує на те, що
коефіцієнт статичної помилки ![]() отже статична
помилка по завданню
отже статична
помилка по завданню ![]()
3.1.3
Визначити сумарну похибку слідкуючої системи, структурна схема якої наведена на
рис. 3.3, коли на неї діє вхідний сигнал![]() і
збурення
і
збурення ![]()
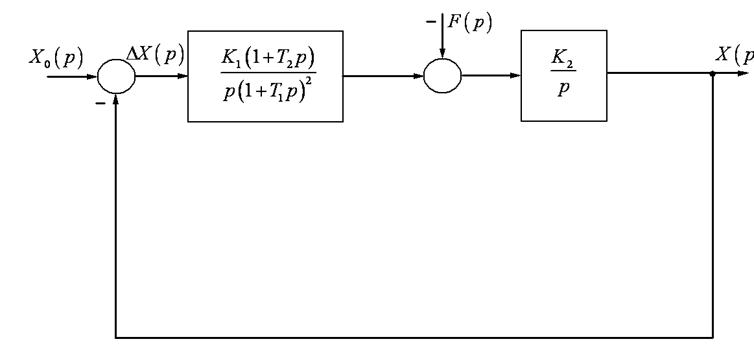 Рисунок 3.3 – Структурна схема слідкуючої
системи
Рисунок 3.3 – Структурна схема слідкуючої
системи
3.1.4 Передатна функція розімкненої слідкуючої САК з одиничним зворотним зв’язком має вигляд:
де ![]()
визначити коефіцієнти помилок: позиційної ![]() швидкісної
швидкісної ![]() і
за прискоренням
і
за прискоренням![]() , вважаючи відсутнім
збурення
, вважаючи відсутнім
збурення![]()
3.1.5 Визначити необхідний коефіцієнт підсилення прямого
тракту системи з астатизмом ![]() , якщо припустима
похибка руху
, якщо припустима
похибка руху![]() , а щонайбільша похідна від керуючого
сигналу
, а щонайбільша похідна від керуючого
сигналу 
3.1.6 Визначити коефіцієнт передачі розімкненої системи автоматичної
стабілізації швидкості двигуна постійного струму з діапазоном регулювання
Д=100:1, якщо, працюючи з номінальним моментом при підключенні до мережі, його
падіння швидкості становить ![]() швидкості
неробочого ходу ω0, а в замкнутій системі воно не може перевищувати
швидкості
неробочого ходу ω0, а в замкнутій системі воно не може перевищувати![]() .
.
3.1.7 Рух слідкуючої системи описується рівнянням

де ![]() Розрахуйте коефіцієнти
похибки вимушеного руху слідкуючої системи та знайдіть значення усталеної
похибки.
Розрахуйте коефіцієнти
похибки вимушеного руху слідкуючої системи та знайдіть значення усталеної
похибки.
3.1.8 Докажіть, що необхідний рівень компесуючого сигналу
за першою похідною від вхідної дії ![]() при якому зникає
швидкісна похибка системи
при якому зникає
швидкісна похибка системи  Алгоритмічна
структурна схема слідкуючої системи має такий вигляд
Алгоритмічна
структурна схема слідкуючої системи має такий вигляд
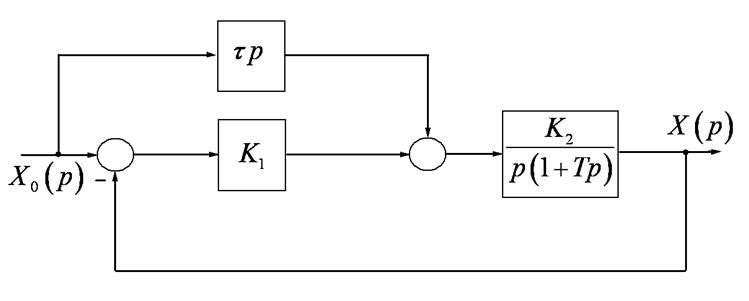
,
де  коефіцієнт, що визначає
рівень компесуючого сигналу. Який порядок астатизму системи по завданню?
коефіцієнт, що визначає
рівень компесуючого сигналу. Який порядок астатизму системи по завданню?
3.1.9 Передатна функція розімкненої системи має вигляд
де K=20; T1=1c; T3=0.5c.
Необхідно за допомогою АЧХ, а потім ЛАЧХ і ЛФЧХ визначити
показники якості процесу керування в перехідному і сталому режимах роботи системи,
якщо ![]()
Список літератури
1. Попович М.Г., Ковальчук О.В. Теорія автоматичного керування. – К.: Либідь, 1997. – 554с.
2. Лукас В.А. Теория автоматического управления. – М.: Недра, 1990. – 416с.
3. Методические указания к домашним заданиям по курсу “Теория автоматического управления (для студентов специальности 7.092203) /Сост.:Н.Н. Сергиенко – Алчевск: ДГМИ, 2003. – 54с
4. Сборник задач по теории автоматического регулирования и управления / Под ред. В.А. Бесекерского. – М.: Надра, 1978. – 512 с.
5. Расчет автоматических систем Учебное пособие / Под ред.. А.В.Фатеева. – М.: Высш. шк., 1973 – 336 с.
6. Куо Б. Теория и проектирование цифровых систем управления: – М.: Машиностроение, 1986. – 448с.
7. Александров А.Г. Оптимальные и адоптивные системы.: Учеб. пособие для вузов по спец. “Автоматика и упр. в техн. системах”. – М.: Высш. шк., 1989. – 263с.
8. Теория автоматического управления: 4.2. Учебник для вузов./ Под ред. А.В. Нетушила. – М.: Высш. школа, 1972.- 432с.
9. Теория автоматического управления. Учебник для вузов./ Под ред. А.В. Нетушила. 2-е изд., доп . и перераб.- М.: Высшая школа, 1976.- 400с.
10. Герасимяк Р.П. Теорія автоматичного керування. Збірник задач: Навчальний посібник. – Одеса: Наука і техніка, 2003. –108с.
11. Зайцев Г.Ф. Теория автоматического управления и регулирования. – 2-е изд., доп. и перераб. – К.: Высшая школа , 1989. – 431с.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.