




















6. ПРОМЫШЛЕННЫЕ РОБОТЫ
Понятие «робот» в общественном мнении совпадает с понятием «промышленная автоматизация». Это лишь частично правильно, потому что, во-первых, робот является лишь элементом общей системы автоматизации, а, во-вторых, самое представление о роботе весьма преувеличено. Однако, несмотря на все неувязки, роботы сами по себе и публичный ажиотаж вокруг них помогают энергично продвигать промышленную автоматизацию на заводы. Эта книга, наверное, не была бы написана, если бы не интерес, высказываемый экономистами, инженерами, студентами и общественностью по отношению к промышленным роботам.
Большинство людей, услышав слово «робот», вспоминает о R2D21 из «Звездных войн». Такая ассоциация имеет некоторый смысл, поскольку слово «робот» в действительности родилось на сцене, а не в цеху. Роботы впервые появились в Нью-Йорке 9 октября 1922 г. в пьесе «Р. У. Р». Их создателем был чехословацкий драматург Карел Чапек, а слово «робот» является сокращением чешского слова robota—«работа» [69].
В 1956 г., более чем через 30 лет после выхода в свет пьесы Чапека, но до появления «Звездных войн», была образована фирма «Юнимейшн». Она целиком занималась робототехникой. Через 16 лет, в 1972 г., затратив 12 млн. долл., «Юнимейшн» выпустила первый робот, предназначенный для промышленности.
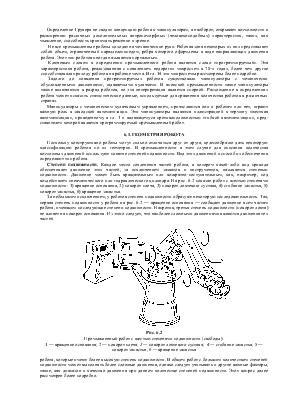
В отличие от робота R2D2 или роботов Чапека, большинство настоящих промышленных роботов мало напоминают людей. В действительности более подходящим для большинства промышленных роботов был бы термин «механическая рука». На рис. 6.1 изображена популярная модель робота с механической рукой, далекого от R2D2, но значительно более полезного с точки зрения производства.
Робот с рис. 6.1 отвечает определению понятия «робот», разработанному Американским институтом роботов:
«Роботом называется перепрограммируемый многофункциональный манипулятор, предназначенный для перемещения материалов, деталей, инструментов или специальных приспособлений посредством различных программируемых движений с целью выполнения разнообразных задач» [70].

Рис. 6.1
Популярная модель робота типа «механическая рука»
Более общее определение робота предложено Микелом Грувером:
«Промышленным роботом называется универсальное программируемое устройство, обладающее определенными антропоморфными характеристиками» [25].
Определение Грувера не сводит концепцию робота к манипуляторам, а наоборот, открывает возможности к расширению различных дополнительных антропоморфных (человекоподобных) характеристик, таких, как мышление, способность принимать решение и зрение.
Не все промышленные роботы походят на механические руки. Рабочая зона некоторых из них представляет собой объем, ограниченный параллелепипедом, ребра которого оформлены в виде направляющих движения робота. Этот тип роботов иногда называется портальным.
Ключевым словом в определении промышленного робота является слово «программируемый». Эта характеристика робота, реализованная с появлением недорогих микросхем в 70-х годах, более чем другие способствовала приходу роботов на рабочие места. В гл. 14 эти микросхемы рассмотрены более подробно.
Задолго до появления программируемых роботов существовали манипуляторы с механически обусловленными движениями, задаваемыми кулачками. В японской промышленности такие манипуляторы также включаются в разряд роботов, но эта интерпретация является спорной. Расхождение в определениях робота может исказить статистические данные, используемые для сравнения количества роботов в различных странах.
Манипуляторы с механическим кулачковым управлением, причисляются они к роботам или нет, играют важную роль в заводской автоматизации. Эти манипуляторы являются иллюстрацией к термину «жесткая автоматизация», приведенному в гл. 1 и являющемуся противоположностью «гибкой автоматизации», представителем которой является программируемый промышленный робот.
6.1. ГЕОМЕТРИЯ РОБОТА
Поскольку конструктивно роботы могут сильно отличаться друг от друга, целесообразно дать некоторую классификацию роботов по их геометрии. В промышленности в этом случае для описания количества возможных движений используют понятие степеней подвижности. Вид этих движений и способ их обеспечения определяют тип робота.
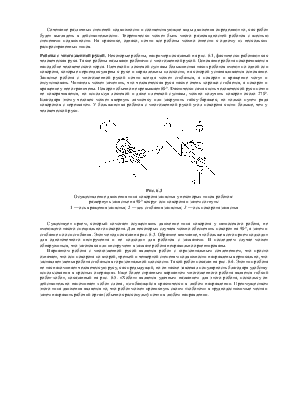
Степени подвижности. Каждое место сочленения частей робота, в котором какой-либо вид привода обеспечивает движение этих частей, за исключением захватов и инструментов, называется степенью подвижности. Движение может быть вращательным или возвратно-поступательным, как, например, под воздействием пневматического или гидравлического цилиндра. На рис. 6.2 показан робот с шестью степенями подвижности: 1) вращение основания, 2) поворот плеча, 3) поворот локтевого сустава, 4) сгибание запястья, 5) поворот запястья, 6) вращение запястья.
За небольшим исключением, у роботов степени подвижности образуют некоторую последовательность. Так, первая степень подвижности у робота на рис. 6.2 — вращение основания — сообщает движение всем частям робота, имеющим последующие степени подвижности. Напротив, третья степень подвижности (поворот локтя) не влияет на поворот основания. Из этого следует, что наиболее сложными движениями являются движения тех частей
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.