Самоустанавливающаяся оснастка. Малейшее отклонение от правильного относительного положения детали или инструмента— робота может привести к полной остановке процесса и, вероятно, к повреждению изделия или руки робота. Чтобы избежать или по крайней мере смягчить последствия неправильного относительного положения можно применить следующий прием: снабдить захват гибким элементом, который позволяет захвату робота слегка смещаться, когда он наталкивается на захватываемый объект. В промышленности такой подход называется самоустанавливающейся оснасткой.
Одним из сложных видов самоустанавливающейся оснастки является компенсирующая муфта. Ее работа показана на рис. 6.17. На рис. 6.17, а робот пытается вставить ось в отверстие, но ему мешает несоосность. Несколько помогает наличие фаски, но ось, вставляемая с помощью жесткой оснастки, может не попасть в отверстие. Даже использование более податливой оснастки может не дать положительных результатов, потому что радиальная составляющая силы контакта с фаской приводит к повороту вставляемой оси вокруг центра жесткости. В конструкции, показанной на рис. 6.17, б, центр жесткости проектируется на входящий в паз конец оси, который является как бы вынесенным центром жесткости. Важным следствием этого является то, что ось сдвигается в радиальном направлении вместо поворота вокруг точки контакта.
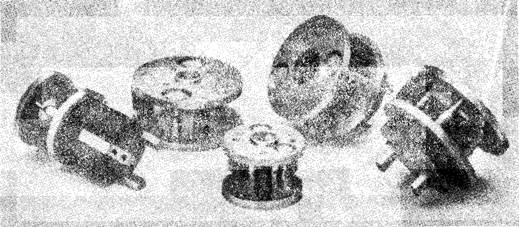
Рис. 6.18
Упругие муфты, облегчающие использование роботов для точных сборочных операций
На рис. 6.17, б представлено положение, когда рассогласования между осью и отверстием в радиальном направлении нет, зато есть рассогласование по углу. Обратите внимание, что в этом случае контакт оси с отверстием происходит в двух точках. Радиальные составляющие контактных сил параллельны и направлены навстречу, но эти силы действуют не по одной прямой: сила слева воздействует на точку оси, находящуюся выше, чем сила справа. Создается момент сил, который действует на ось и на упругую муфту, показанную на рис. 6.17, г, что позволяет оси войти в отверстие. Внешний вид упругих муфт показан на рис. 6.18.
Более простой прием, срабатывающий в некоторых случаях, заключается в использовании резины или нейлона в конструкциях пальцев захвата, что позволяет обеспечить мягкое, податливое удержание объекта, напоминающее действие человеческих пальцев. Любая оснастка, обеспечивающая гибкость захвата, может рассматриваться как самоустанавливающаяся. Изложенный принцип очень прост и кажется совершенно очевидным для решения проблемы обеспечения захвата, однако удивительно часто применение роботов оказывается неудачным из-за того, что пользователю или инженеру не приходит в голову этот принцип применить.
6.5. ПРОГРАММИРОВАНИЕ
Главной особенностью робота является его способность к перепрограммированию для выполнения различных задач. Эта черта отсутствовала у механических манипуляторов, которые можно было видеть и до появления роботов в 70-х годах. В гл. 7 программирование роботов рассмотрено более детально, но основная классификация приведена здесь.
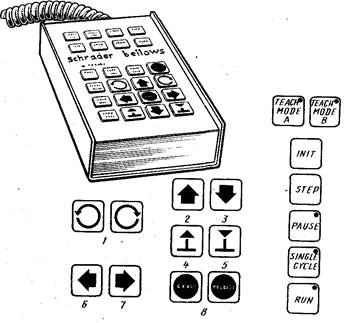
Рис. 6.19
Панель обучения промышленного робота. Функциональное назначение клавиши:
1 — поворот запястья ( на 90° или 180°); 2 — выдвинуть руку; 3 — убрать руку; 4 — подъем; 5 — опускание;
6 — поворот налево; 7 — поворот направо; 8 — управление захватом (зажать, разжать)
Для программирования некоторых роботов необходимо вручную вставлять в барабан штыри, которые нажимают на электрические выключатели в заданной последовательности. Другие роботы программируются на диалекте какого-либо распространенного языка, например языка Бейсик. Одним из таких диалектов является АРМБейсик — язык для роботов, названный так фирмой «Микробот», его создателем и владельцем авторских прав [42]. Другим языком программирования для роботов является ВАЛ, разработанный фирмой «Юнимейшн» для сложных роботов модели ПУМА [73].
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.