Рис. 6.20
Механическая рука для обучения робота непосредственной имитацией движений в режиме обучения
6.6. ВОЗМОЖНОСТИ ОЧУВСТВЛЕНИЯ
Механическое манипулирование имеет много областей применения, однако его успешность сильно зависит от позиционирования и ориентации деталей. К тому же, слепое повторение механических операций может оказаться катастрофическим, если что-то произошло не так, как положено. Робот, способный «видеть» или «ощущать» приложенную нагрузку и некоторые условия окружающей обстановки, может применяться значительно шире, чем его более ограниченные «сородичи», действующие как «глухие», «немые» и «слепые» манипуляторы.
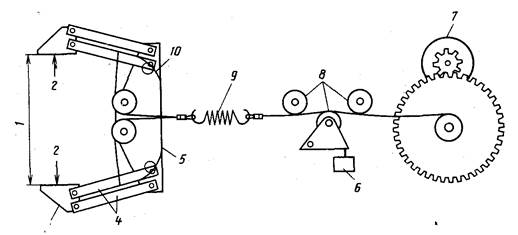
Рис. 6.21
Устройство, использующее «принцип сухожилия». Трос, проходящий в руке робота, позволяет одновременно управлять захватом и регулировать усилие зажима. Обратите внимание на установку конечного выключателя, контролирующего натяжение троса:
1 — раскрытие захвата; 2 — направление усилий; 3 — захват; 4 — рычаги; 5 — корпус;
6 — конечный выключатель для контроля натяжения; 7 — двигатель привода; 8 — натяжные ролики; 9 — пружина растяжения; 10 — пружина кручения
Способность ощущать может быть развита у роботов в различной степени. Разными могут быть и устройства очувствления. Например, к оптическим системам относятся как простые фотоэлементы, так и сложные системы пространственного видения. Ниже описаны различные категории устройств очувствления, начиная с простейших и наиболее практичных и кончая самыми сложными из имеющихся.
Контроль усилия зажима. Вероятно, самой элементарной формой очувствления роботов является придание их захватам способности контролировать усилие зажима между пальцами. В простейшем случае датчик усилия зажима представляет собой обычный конечный выключатель, который срабатывает при достижении установленного значения усилия. Этот выключатель практически является предохранительным устройством против чрезмерного закрытия захвата в случае ошибки в программе или изменения размеров зажимаемой детали. Однако это устройство может использоваться значительно шире, чем только для предохранения, поскольку конечный выключатель может служить также для обеспечения стандартного усилия зажима при измерении. Так, робот может измерять толщину объекта, просто зажимая его в захвате. Эта способность робота обходится недорого, при этом робот легко обгоняет по точности человеческую руку.
Иногда закрытие захвата и обеспечение определенного усилия сливаются в одну операцию. Этого можно достигнуть, например, используя «принцип сухожилия», т. е. приводя захваты в движение при помощи тросов, соединенных с двигателем, установленным на основании робота. На рис. 6.21 показано, как одна из фирм-изготовительниц роботов (фирма «Микробот») устанавливает конечный выключатель для контроля натяжения троса, управляющего закрытием захвата. На рис. 6.22 представлены графики зависимостей между раскрытием захвата и количеством шаговых импульсов (левая часть), а также усилием зажима и числом шаговых импульсов (правая часть), иллюстрирующих двоякую роль, которую играет в механизме трос. Способность устройства измерять толщину характеризуется допуском ±l/16 дюйма (1,6 мм), указанным в документации, однако в действительности робот модели «Микробот Минимувер 5» продемонстрировал значительно лучшие результаты.
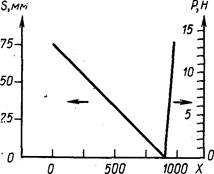
Рис. 6.22
Графики зависимостей раскрытия захвата S и усилий зажима Р от количества импульсов X, отработанных шаговым двигателем механизма, использующего «принцип сухожилия»
Рассмотрим пример расчета количества импульсов, подаваемых на шаговый двигатель для захвата объекта известного размера при определенном усилии сжатия.
Контроль присутствия с помощью оптических средств. Поскольку робот уже получил способность чувствовать усилие зажима, следующим шагом будет снабжение его каким-либо устройством контроля присутствия объекта, обычно фотоэлементом.
Естественное место для установки датчика, определяющего наличие объекта, —захват, однако он ни в коей мере не является единственным местом установки. В действительности датчики обычно на захватах не устанавливаются. В таких случаях единственной физической связью между датчиком и роботом является электрический кабель.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.