Фотоэлектрические датчики могут быть расположены в различных местах вокруг рабочего объема робота с тем, чтобы они служили для обеспечения безопасности, останавливая робот в случае, если он неожиданно из этого объема выйдет. По меньшей мере один ведущий производитель роботов (фирма «Праб») практикует оснащение каждого нового робота складным ограждением, закрывающим рабочее пространство. Ограждение имеет дверь с электрической блокировкой: при открытой двери робот останавливается.
Фотоэлектрические датчики являются наиболее популярными устройствами контроля присутствия, однако существуют другие типы датчиков. Преимуществом инфракрасных датчиков является помехоустойчивость по отношению к обычному свету. Датчики, работающие в диапазоне радиочастот, должны быть настроены на срабатывание в нужное время и от нужного объекта. Работа этих датчиков зависит от размеров и проводимости объектов, присутствие которых необходимо установить, поэтому нестабильность свойств этих объектов может вызвать некоторые затруднения.
Техническое зрение робота. В области распознавания образов с помощью оптических средств ведутся интенсивные разработки, и некоторые роботы уже способны распознавать объекты на конвейере по их очертаниям. Благодаря этому нужный объект может быть захвачен роботом при любой его ориентации и установлен в требуемом положении на рабочей позиции. Техническое зрение — прекрасная и многообещающая вещь, однако в области робототехники, по крайней мере в двадцатом веке, будут преобладать более привычные фотоэлектрические устройства для определения присутствия объектов.
Тактильные датчики. Чувство осязания человека является удивительным феноменом, и перед учеными еще стоит проблема создания захватов робота, способных действительно «чувствовать» разницу между различными структурами поверхности и формами. Однако В. Д. Хиллис и Д. Холлербек из Массачусетского технологического института уже разработали захват робота, который может «почувствовать» разницу между винтами, шайбами и шплинтами. В [241 П. Киннукан рассказывает, что Хиллис и Холлербек использовали «Л'эггсовские сверхтонкие колготки» для изготовления матрицы, состоящей из 256 (16х16) чувствительных к давлению выключателей, которые поставляют информацию для обработки на ЭВМ. Материал колготок был заложен между листом проводящей силиконовой резины и гибкой печатной платой. В нормальном состоянии резина и плата разделены материа лом колготок, но в точках нагружения материалы контактируют через сетку материала, создавая матрицу чувствительных точек. Рисунок, образуемый контактами, анализировался ЭВМ с целью распознавания объекта, взятого роботом. Эксперимент с колготками был предшественником современных осязательных систем, использующих электроконтактные решетки. Для этой цели оказались очень полезными пьезоэлектрические материалы, генерирующие при деформации электрические сигналы. На рис. 6.23 изображена осязающая решетка, изготовленная на основе поливинилиденфлюорида (РУРд), имеющего пьезоэлектрические свойства.
Распознавание голоса. Ученые, изобретатели и фантасты-мечтатели предвидят день, когда люди смогут говорить с промышленными роботами и обучать их, отдавая приказания голосом. Однако это сложная техническая проблема будет решена только в самых дорогих промышленных роботах. Век настоящих роботов R2D2, без сомнения, наступит через несколько десятилетий.
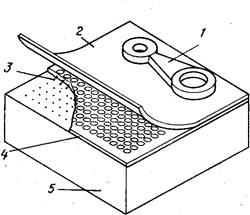
Рис. 6.23
Электроконтактная решетка, используемая в конструкциях тактильных датчиков:
1 — распознаваемые объект; 2 — пластина из поливинилиденфлюорида; 3 — электрические контакты; 4 — печатная плата; 5 — заземленный корпус
6.7. ТЕХНИЧЕСКИЕ ХАРАКТЕРИСТИКИ
Основные особенности, отличающие дорогие многофункциональные роботы от более дешевых, уже описаны. Есть, однако, ряд общих технических характеристик, которые важно учитывать при выборе робота для данной области применения.
Грузоподъемность. Грузоподъемность является важной характеристикой, однако ее не так просто определить. Большинство роботов способны удерживать значительно большую массу, чем та, с которой они могут поворачиваться с максимальной скоростью. На способность робота эффективно манипулировать объектами влияет также форма объекта и состояние его поверхности. Грузоподъемность робота в случае, если груз находится близко к основанию, очевидно, выше, чем при полном вылете руки.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.