Типичным движением робота является подъем детали по вертикали с сохранением ее ориентации. Далее показано, что для робота в полярных координатах такое движение требует одновременных скоординированных движений по трем осям: в плечевом суставе, в руке и в запястье. Для роботов с многозвенной рукой это также представляет проблему, так как требует одновременных скоординированных движений плечевого и локтевого суставов и поворота запястья.
Промышленные роботы, работающие в цилиндрических координатах. Робот, работающий в цилиндрических координатах, имеет вертикальное возвратно-поступательное движение для второй степени подвижности или подвижное основание. Обычно это выполняется с помощью пневматического или гидравлического цилиндра, но для роботов больших габаритов может быть использована передача типа колесо—рейка или цепная передача (рис. 6.7). Оси А, В и С робота, работающего в цилиндрических координатах, образуют рабочее пространство в форме цилиндра. Роботы такого типа обычно имеют возвратно-поступательное движение по третьей степени подвижности аналогично роботам, работающим в полярных координатах. У роботов, работающих в цилиндрических координатах, можно получить движение основания и поворот плечевого сустава, придавая им дополнительную степень подвижности между основанием и запястьем. Такие роботы имеют восемь степеней подвижности, но такие компоновки считаются редкими.
Проблема подъема детали или инструмента по вертикали легко решается у роботов, работающих в цилиндрических координатах. Для этого требуется только одна степень подвижности вместо трех осей движения, необходимых роботам, работающим в полярных координатах, или роботам с многозвенной рукой. Недостатком роботов, работающих в цилиндрических координатах, является то, что они не могут огибать препятствия.
Роботы, работающие в декартовой системе координат. Рабочим, имеющим дело со станками, удобнее использовать роботы, работающие в декартовой системе координат. Чаще всего такие роботы устанавливаются на порталах, но могут быть смонтированы на рельсах, установленных на полу. Первые три оси роботов, работающих в декартовой системе координат — это оси X; Y и Z металлорежущих станков. Преимуществом описываемого типа роботов является их жесткость, обеспечиваемая за счет коробчатой конструкции рамы портала. Небольшое количество узлов робота перемещается на консоли, это самые легкие узлы, близкие к рабочему органу. Маленькие роботы, работающие в декартовых координатах, могут обеспечить более жесткие допуски, а для очень больших роботов такая конструкция становится обязательной.

Рис. 6.5
Многозвенный робот типа «хобот»
Рис. 6.6
Робот, работающий в полярных координатах
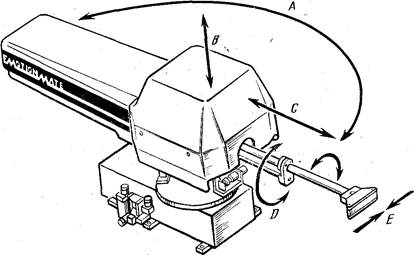
Рис. 6.7
Робот, работающий в цилиндрических координатах:
А — вращение основания; В — подъем робота; С — выдвижение руки; D — вращение;
Е — захват
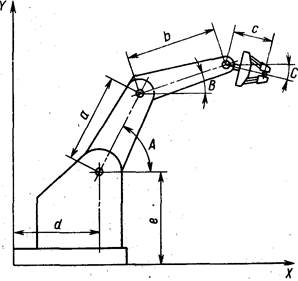
Рис. 6.8
Схема для расчета положения центральной точки инструмента
Рабочее пространство.
Зная степени подвижности робота и его конструктивные особенности, связанные с осуществлением этих степеней подвижности, пользователь, применяя геометрию и тригонометрию, может определить положение центральной точки инструмента в зависимости от различного осевого положения частей робота. На рис. 6.8 приведен расчет положения центральной точки инструмента как функции положения звеньев робота. Обратите внимание на то, что углы Л, В и С измеряются от прямых," параллельных оси X. Углы А и В имеют направление против часовой стрелки (положительные углы), а угол С — по часовой стрелке и поэтому считается отрицательным. Синус отрицательного угла отрицателен, поэтому выражение с sin С в формуле для определения У отрицательно. Изучение диаграммы движения звеньев робота, показанной на рис. 6.8, подтверждает справедливость этого положения.
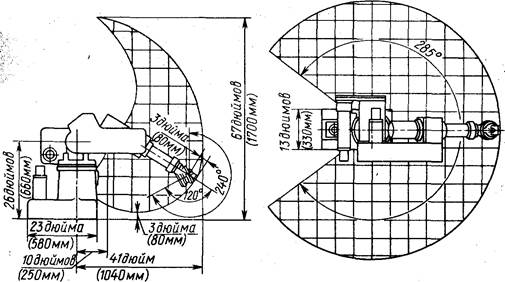
Рис. 6.9
Пример рабочего объема промышленного робота
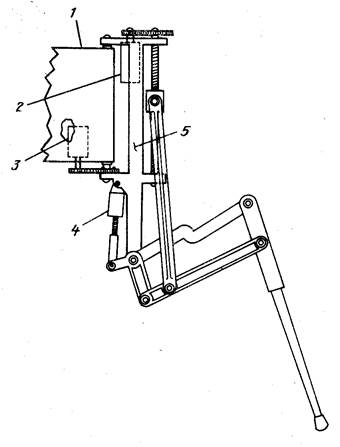
Рис. 6.10
|
|
Конструкция ноги шагающего робота:
1 — несущая конструкция; 2 — двигатель вертикального перемещения; 3 — двигатель поворота ноги; 4 — двигатель выдвижения ноги; 5 — каркас ноги
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.