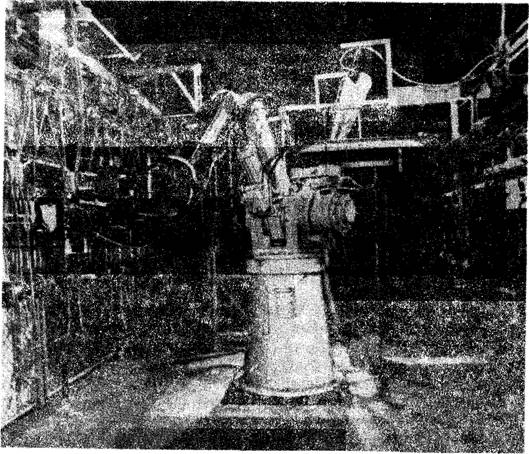
Рис. 6.11
Гидравлический робот
На рис. 6.12 изображен такой робот, работающий в цилиндрических координатах, грузоподъемностью до 5 фунтов (22 кг).
Роботы с пневмоприводом обычно работают по упорам на каждой из осей. Эти упоры ничем не отличаются от тех, что использовались в пневмоприводах до появления роботов. В действительности, робот с пневмоприводом является конструкцией, состоящей из нескольких пневмоцилиндров, каждый из которых осуществляет движение по одной из осей.
При управлении движением по осям только в конечных точках у читателя может возникнуть вопрос, что же программируется у робота с пневмоприводом. Вспомните, однако, что время цикла и последовательность движения являются важными характеристиками, изменение которых создает бесконечное количество вариантов программ для управления роботом с пневмоприводом, даже без применения гаечного ключа. Если прибавить сюда наладку упоров, количество вариантов еще возрастет. Следовательно, непрерывно управляемого, постоянно изменяемого движения обычный робот с пневмоприводом обеспечить не может.

Рис. 6.12
Пневматический робот
Есть, все же, один тип робота с пневмоприводом, конечно не типичный по конструкции, позволяющий получить непрерывное управляемое движение посредством приема, известного как дифференциальная осцилляция. При этом подается ряд коротких импульсов сжатого воздуха, заставляющих рабочий орган робота перемещаться в заданном направлении, проходя весь путь под непрерывным контролем. На рис. 6.13 показан образец выпускаемого промышленностью недорогого робота с пневмоприводом, использующего прием дифференциальной осцилляции для получения контролируемого движения.
Одним из принципиальных преимуществ роботов с пневмоприводом является модульность их конструкции наряду с возможностью использования стандартных покупных компонентов. Это относится и к другим роботам, но особенно ярко проявляется у роботов с пневмоприводами. Эта особенность открывает возможность для деятельности тех фирм, которые решили создать свой собственный робот, подчас со значительной экономией средств. Некоторые поставщики компонентов для роботов рекламируют концепцию «сделай сам» при продаже своей продукции. Та фирма, которая решила действовать в направлении «сделай сам», чтобы сэкономить на стоимости оборудования, должна также учитывать дополнительную стоимость проектирования и затраты на приобретение компонентов.
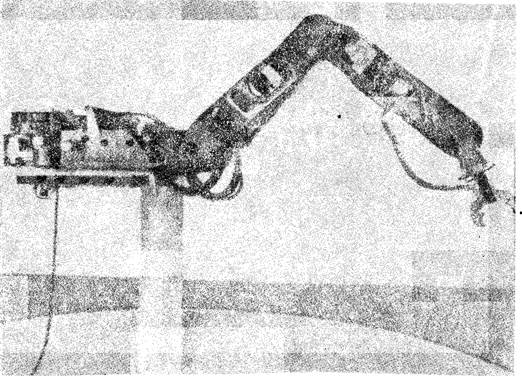
Рис. 6.13
Пневматический робот с непрерывным управлением по пути за счет дифференциальной осцилляции
Роботы с электрическим приводом. Роботы с электроприводом широко применяются для точных работ потому, что они позволяют обеспечить точное перемещение и способны к обучению сложным операциям. Можно возразить, что многие роботы с гидроприводом имеют подобные характеристики, однако наиболее сложные движения являются типичными именно для полностью электрических моделей роботов.
Роботы с электроприводом можно разделить на две группы соответственно типам электрических двигателей, обеспечивающих перемещение по осям. В первой группе используются шаговые двигатели (см. гл. 2), которые осуществляют точное угловое перемещение под воздействием единичных импульсов напряжения, генерируемых системой управления приводами. Перемещение ротора шагового двигателя может быть очень точным, если момент
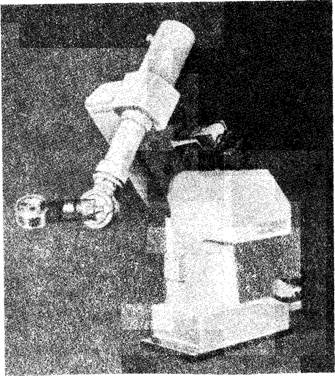
Рис. 6.14
Робот, оснащенный электродвигателями постоянного тока нагрузки не превышает предельный момент, установленный для данного двигателя. Из-за этой точности роботы с шаговым приводом иногда имеют разомкнутую систему управления, т. е. устройство ЧПУ вычисляет количество импульсов, необходимое для осуществления заданного движения, и передает команду роботу, не проверяя, совершил ли он это движение. К сожалению, из-за каких-либо препятствий или по другим причинам в механической передаче робота может произойти проскальзывание, поэтому робот не всегда полностью выполняет заданное движение. Когда это происходит, робот с разомкнутой обратной связью теряет управление, и устройство ЧПУ не может определить действительного положения его подвижных частей. При этом робот продолжает следующие циклы с постоянной ошибкой по положению, что может сделать операцию полностью бесполезной или даже разрушительной. Выход из неприятного положения
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.