Рис. 6.2
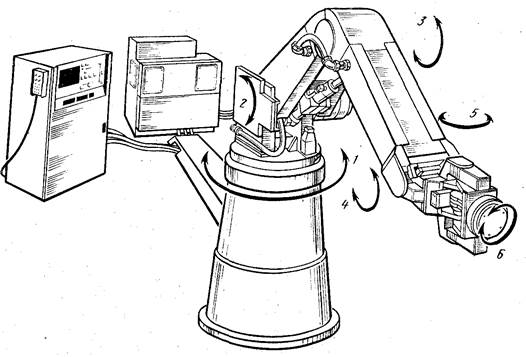
Промышленный робот с шестью степенями подвижности (свободы):
1 — вращение основания; 2 — поворот плеча; 3 — поворот локтевого сустава; 4 — сгибание запястья; 5 — поворот запястья; 6 — вращение запястья робота, которые имеют более высокую степень подвижности. В общем робот с большим количеством степеней подвижности может выполнять более сложные движения, однако следует учитывать и другие важные факторы, такие, как диапазон и качество движения при данном количестве степеней подвижности. Этот вопрос далее рассмотрен более подробно.
Сочетание различных степеней подвижности и соответствующие виды движения определяют то, как робот будет выглядеть в действительности. Теоретически может быть много разновидностей роботов с шестью степенями подвижности. На практике, однако, почти все роботы можно отнести к одному из нескольких распространенных типов.
Роботы с многозвенной рукой. Некоторые роботы, например показаный на рис. 6.1, фактически работают как человеческая рука. Такие роботы называют роботами с многозвенной рукой. Основание робота поворачивается наподобие человеческого торса. Плечевой и локтевой суставы большинства таких роботов имеют по одной оси поворота, которые перпендикулярны к руке и параллельны плоскости, на которой устанавливается основание. Запястье робота с многозвенной рукой почти всегда может сгибаться, а поворот и вращение могут и отсутствовать. Читатель может заметить, что человеческая рука также очень хорошо сгибается, а поворот и вращение у нее ограничены. Поворот обычно не превышает 60°. Фактически сама кисть человеческой руки почти не поворачивается, но используя локтевой и даже плечевой суставы, можно получить поворот около 270°. Благодаря этому человек может ввернуть лампочку или закрутить гайку-барашек, но только путем ряда поворотов с перехватом. У большинства роботов с многозвенной рукой угол поворота кисти больше, чем у человеческой руки.
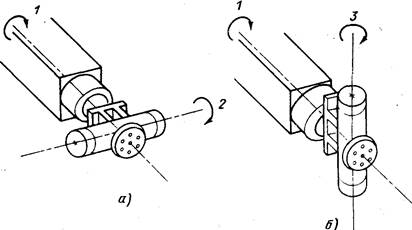
Рис. 6.3
Осуществление движения типа поворота запястья у некоторых типов роботов:
развернуть запястье на 90° вокруг оси поворота и затем согнуть:
1 — ось вращения запястья; 2 — ось сгибания запястья; 3 — ось поворота запястья
Существует прием, который помогает осуществить движение типа поворота у пятиосевого робота, не имеющего такого специального поворота. Для некоторых случаев можно обеспечить поворот на 90°, а затем и сгибание по оси сгибания. Этот метод показан на рис. 6.3. Обратите внимание, что больше всего прием подходит для одноточечного инструмента и не подходит для роботов с захватами. В последнем случае может обнаружиться, что заготовка или инструмент в захвате робота неправильно ориентированы.
Вариантом робота с многозвенной рукой является робот с горизонтальным сочленением, что просто означает, что оси поворота по второй, третьей и четвертой степеням подвижности направлены вертикально, что заставляет звенья робота сгибаться в горизонтальной плоскости. Такой робот показан на рис. 6.4. Этот тип робота не так напоминает человеческую руку, как предыдущий, но он также завоевал популярность благодаря удобству использования в простых операциях. Еще более странным вариантом многозвенного робота является гибкий робот-хобот, показанный на рис. 6.5. «Хобот» является удачным названием для этого робота, поскольку он действительно напоминает хобот слона, изгибающийся практически в любом направлении. Преимуществом этого типа движения является то, что робот может проникнуть своим «хоботом» в труднодостижимые места и затем направить рабочий орган (обычно краскопульт) почти в любом направлении.
Рис. 6.4
|
|
Робот со звеньями, сгибающимися в горизонтальной плоскости
Промышленные роботы, работающие в полярных координатах. Роботы, работающие в полярных или цилиндрических координатах выглядят совершенно иначе, чем роботы с многозвенной рукой, но отличие фактически имеется только в третьей оси (3-й степени подвижности). Вместо локтевого сустава такой робот имеет пневматический или гидравлический цилиндр, который обеспечивает удлинение руки. Робот, работающий в полярных координатах (рис. 6.6), очень распространен в автомобилестроении.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.