7. ОБУЧЕНИЕ РОБОТА ВЫПОЛНЕНИЮ РАБОТ
В гл. 6 показано, что промышленный робот является значительно более универсальным устройством, чем заменяемый им манипулятор. Однако эта универсальность оборачивается для пользователя обязанностью обучать робот выполнению данной операции или группы операций. Каждому уровню универсальности робота соответствует определенный уровень сложности его обучения, вернее его обучаемости. Однако технология, которая обеспечила универсальность робота, способна сделать обучение легким, продуктивным и удобным для потребителя. Наиболее процветающими среди производителей роботов оказываются те, которые концентрируют свое внимание на этой стороне взаимоотношений между роботом и человеком.
7.1. МИР РОБОТОВ И МИР РЕАЛЬНОСТИ
Чтобы осознать всю сложность проблемы обучения робота, проведем следующий эксперимент. Представьте себя стоящим между двумя урнами для голосования. Большим и указательным пальцами левой руки сделайте движение, как будто берете прямой стержень, вставленный в урну, поставленную на 1 фут (30,5 см) правее правого плеча и немного впереди него. Можете повернуть голову, чтобы видеть, как левая рука справляется с заданием, но корпус при этом держите как можно прямее. Теперь перемещайте воображаемый стержень по прямой линии влево, пока можно дотянуться, и имитируйте установку стержня во вторую урну.
Если перемещение стержня происходило действительно по прямой, рука по дороге проходила очень близко от лица и шеи. Повторите движение, обращая пристальное внимание на положение и действия локтевого и плечевого суставов и запястья. Движения весьма сложны, суставы принимают своеобразные положения, а гибкость, с которой они меняют положение, ускоряя и замедляя движение, даже когда скорость воображаемого стержня поддерживается постоянной, кажется сверхъестественной. Такова сложность обычного движения руки, такова наша способность принимать как должное тот метод, которым еще в детском саду обучили рисовать прямые линии.
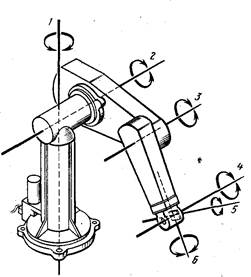
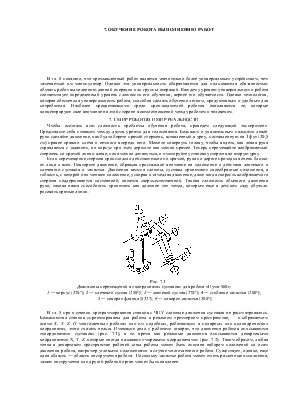
Рис. 7.1
Диапазоны перемещений в «координатах суставов» для робота «Пума-560»:
1 — корпус (320°); 2 — плечевой сустав (250°); 3 — локтевой сустав (270°); 4 — сгибание запястья (200°);
5 — поворот фланца (532°); 6 — поворот запястья (300°)
В гл. 5 при изучении программирования станков с ЧПУ сложные движения суставов не рассматривались. Большинство станков спроектированы для работы в реальном трехмерном пространстве, изображаемом осями X, Y, Z. О многозвенных роботах или им подобных, работающих в полярных или цилиндрических координатах, этого сказать нельзя. Имеющие дело с роботами говорят, что движения роботов описываются «координатами суставов» (рис. 7.1), в то время как реальные движения описываются декартовыми координатами X, Y, Z, которые иногда называют «мировыми координатами» (рис. 7.2). Таким образом, любая точка в декартовом пространстве рабочей зоны работы может быть описана набором положений по осям движения робота, например угловыми положениями в случае многозвенного робота. Существует, однако, еще одна область — область инструмента робота. Поскольку запястье робота может иметь различные исполнения, захват инструмента или другой рабочий орган может быть наклонен
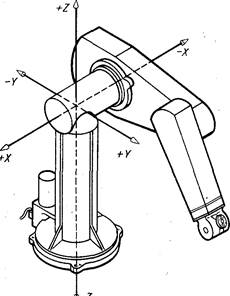
Рис. 7.2
Система «мировых координат» для робота «Пума-560»
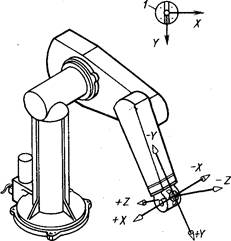
Рис. 7.3
Система координат инструмента для робота «Пума-560»:
I — монтажный фланец (вид с торца)по разным направлениям, даже когда центральная точка инструмента остается в одном и том же положении. Понятно, что одно положение в реальном мире (в мировых координатах) может быть представлено целой группой положений в мире робота (в координатах звеньев). Иногда может потребоваться запрограммировать движение робота, принимая за базу инструмент, а не робот или мировые координаты. При извлечении пневматического винтоверта из глубокой цековки резьбового отверстия важно не положение звеньев робота или ориентация окружающих предметов (обстановки) в реальном мире, а положение инструмента. «Обратное» движение винтоверта должно быть параллельно его оси центров. Обычно это интерпретируется как движение в отрицательном направлении по оси системы координат, именуемой «система координат инструмента» (рис. 7.3). Другие движения инструмента могут потребовать перемещения в плоскости XZ системы вместо перемещения только по оси Z.
Возможно рассчитать движение каждого звена робота и обеспечить любое перемещение в окружающем пространстве или в пространстве координат инструмента, задавая перемещения только в координатах звеньев робота. Теоретически это возможно, а на практике — нет. На рис. 6.10 было показано, какие сложные тригонометрические преобразования необходимо выполнить, чтобы перевести угловые положения звеньев с учетом их длин в координаты по одной только оси Х декартовых координат. Подобные сложные вычисления требуются и для перехода к координатам по осям Y и Z, не говоря уже о комбинированных преобразованиях, необходимых для связи системы координат инструмента с реальным миром. Сложность проблемы возрастает, если робот способен осуществлять непрерывное движение по заданной траектории, что ставит задачу рассчитать не только переход от точки к точке, но и сопутствующее изменение скорости движения.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.