|
| . . REACTI —2, DANGER, ALWAYS . | . IGNORE 2, ALWAYS . | SUBROUTINE DANGER | . |
(в этой части программы робот постоянно находится наготове, следя за уровнем сигнала на входе канала 2. Если появляется сигнал низкого уровня, программа немедленно перейдет к подпрограмме DANGER за следующей инструкцией) (эта подпрограмма предписывает роботу действия в том случае, если во время действия инструкции REACT на входных зажимах появляется сигнал низкого уровня) |
Изложенное здесь введение в язык ВАЛ, предназначенный для управления роботами, ни в коей мере не отражает всех его возможностей. Оно должно дать читателю представление о некоторых задачах управления роботами и путях их решения при помощи мощного языка программирования вообще и языка ВАЛ, разработанного фирмой «Юнимейшн» в частности.
В приложении А приведен пример программы на языке ВАЛ, разработанной студентами Центра робототехники и автоматизации Арканзасского университета. Программа показывает, каким образом робот ПУМА может быть обучен синхронизации движения с движением дополнительного оборудования даже при сборке «на лету» на движущемся конвейере.
Другая программа на языке ВАЛ (приложение С) дает возможность роботу собирать кубик Рубика, начиная с любого запутанного положения. Кажется, что такие примеры имеют мало общего с производством, но на самом деле они позволяют продемонстрировать, как гибко можно запрограммировать робот на выполнение длинных и сложных последовательностей действий — более сложных, чем это посильно для большинства людей. Сборка кубика Рубика хорошо иллюстрирует способность робота приспосабливаться к данной ситуации, поскольку решения для каждой из 43*1018 исходных комбинаций различны. Перспективы использования таких возможностей в робототехнике восхитительны.
7.4. ЯЗЫК АРМБЕЙСИК
Универсального языка программирования для роботов не существует. Язык ВАЛ является собственностью фирмы «Юнимейшн», а язык АРМБейсик принадлежит фирме «Микробот» [37]. Многие колледжи и университетские лаборатории оснащены роботами марок «Микробот Минимувер» и «Тичмувер», поэтому язык АРМБейсик может оказаться полезным для студентов в их лабораторных занятиях. Однако действительной целью ознакомления с этим языком, которая здесь преследуется, будет вооружение студента общим пониманием возможностей и ограничений, которые имеет язык робота, в качестве подготовки к работе на
производстве.
Язык для микроЭВМ Бейсик применяется почти на всех промышленно выпускаемых микроЭВМ, и для получения языка АРМБейсик достаточно заложить в память ЭВМ дополнительную информацию с магнитной кассеты или диска. Конечно, от языка АРМБейсик мало пользы, пока рука робота также не присоединена к микроЭВМ, поэтому типоразмерный ряд роботов модели «Микробот Минимувер» сконструирован именно для такого присоединения. Робот «Минимувер» и «Тичмувер», оснащенные шаговыми двигателями, относятся к роботам без обратной связи, поэтому на языке АРМБейсик программируется подача на их входы серий импульсов, как это было объяснено в гл. 2 и 6. Таким образом, материал этой главы охватывает языки программирования для обоих основных типов роботов — с обратной связью (ВАЛ фирмы «Юнимейшн») и без обратной связи (АРМБейсик фирмы «Микробот»).
Поскольку АРМБейсик используется для управления роботами без обратной связи, управляющая ЭВМ в действительности
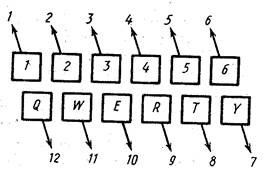
Рис. 7.10
Клавиатура управления движением робота «Микробот Минимувер-5»:
1 — вращение основания по часовой стрелке; 2 — подъем плеча; 3 — подъем локтевого сустава;
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.