










Часть 2
МАТЕМАТИЧЕСКОЕ ОБЕСПЕЧЕНИЕ СИСТЕМ УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМИ ПРОЦЕССАМИ
ГЛАВА 3
АЛГОРИТМЫ ПЕРВИЧНОЙ ОБРАБОТКИ ИНФОРМАЦИИ В АСУТП
3.1. ЗАДАЧИ ПЕРВИЧНОЙ ОБРАБОТКИ ИНФОРМАЦИИ
Основным видом информации о состоянии объекта управления в АСУТП являются текущие значения технологических параметров, которые преобразуются автоматическими измерительными устройствами в сигналы измерительной информации. После приведения к стандартной форме эти сигналы вводятся в УВМ и представляют в ней значения соответствующих параметров в определенный момент времени.
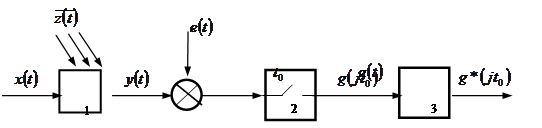
Однако формируемый таким образом массив исходной информации не пригоден для непосредственного использования при решении задач управления, так как требуется его предварительная обработка, которою принято называть первичной*. Для того чтобы сформулировать задачи первичной обработки информации (ПОИ) в АСУТП, необходимо рассмотреть последовательность преобразований, которым подвергается измеряемая величина в типовом информационно-измерительном канале (ИИК), схема которого представлена на рис. 3.1**.
Измеряемая величина x(t), которую обычно считают стационарной случайной функцией времени, воздействует на вход измерительного преобразователя (ИП), на выходе которого формируется сигнал измерительной информации y(t). Принцип действия большинства ИП таков, что их выходной сигнал зависит не только от значения измеряемой величины, но и от ряда других величин zi, которые называют влияющими.
Например, термоэлектрический преобразователь температуры (ТПТ) преобразует измеряемую величину — температуру — в сигнал измерительной информации — э.д.с. Однако этот сигнал зависит не только от измеряемой температуры, которая воспринимается рабочим спаем, но и от температуры свободных спаев, которая в данном случае является влияющей величиной.
|
|
Рис. З.1. Структурная схема информационно-измерительного канала:
1 — первичный измерительный преобразователь (датчик); 2 — коммутатор; 3 — аналого-цифровой преобразователь
В общем случае без учета динамической характеристики ИП связь между сигналами на его входе и выходе описывается статической характеристикой вида:
![]() (3.1)
(3.1)
где f— функция непрерывная и дифференцируемая но всем аргументам; г— вектор влияющих величин.
Например, статическая характеристика ТПТ в первом приближении может быть описана линейной функцией
![]() (3.1а)
(3.1а)
где y— э. д. с. ТПТ, мВ; х — температура рабочего спая, °С; z— температура свободных спаев, °С; k— коэффициент, численное значение которого зависит от материала электродов ТПТ (например, для хромель-копелевого ТПТ k=0,0695 мВ/°С).
Однозначное соответствие между сигналом измерительной информации и измеряемой величиной соблюдается только при постоянных значениях влияющих величин. Для каждого ИП эти номинальные значения z0jуказывают в его паспорте. Подставив их в уравнение .(3.1), получим номинальную (паспортную) статическую характеристику ИП:
![]() (3.2)
(3.2)
В большинстве случаев для ТПТ номинальное значение температуры свободных спаев принято равным 0°С, поэтому паспортная статическая характеристика, полученная из (3.1 а) при z = 0, имеет вид: y=kx.
Будем считать, что в процессе работы ИП значения влияющих величин соответствуют номинальным; следовательно, преобразование значений измеряемой величины в сигнал измерительной информации выполняется в соответствии с паспортной статической характеристикой (3.2). Казалось бы, это должно гарантировать точное преобразование х в у, однако и при выполнении этого условия всякий реальный ИП вносит в результаты некоторую погрешность. На структурной схеме (см. рис. 3.1) она представлена в виде случайной функции времени e(t), которая накладывается на полезный сигнал y(t) измерительной информации. Помеха е(t) моделирует не только случайную погрешность ИП, но и электрические наводки в соединительных проводах, вызванные магнитными полями электросилового оборудования; влияние пульсаций давления и расхода в технологических трубопроводах вследствие работы насосов и компрессоров и другие факторы. На вход УВМ поступает суммарный сигнал:
![]() (3.3)
(3.3)
Поскольку АСУТП имеет много ИИК, их обслуживание разделено во времени, каждый канал периодически с периодом toподключается на короткое время ко входу УВМ. В результате непрерывная функция g(t) преобразуется в последовательность импульсов, модулированных по амплитуде функцией g(t). На структурной схеме ИИК (см. рис. 3.1) функцию квантования сигнала g(t) по времени выполняет коммутатор, условно изображенный в виде ключа, замыкаемого с периодом t0. На выходе коммутатора образуется решетчатая функция:
 j=0,1,2,3…
j=0,1,2,3…
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.