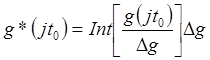
Следующим видом преобразования, которому подвергается сигнал измерительной информации в ИИК, является квантование по уровню, выполняемое аналого-цифровым преобразователем (АЦП). При этом амплитуды импульсов g(jt0) преобразуются в числа g*(jt0), выраженные в коде, с которыми в дальнейшем оперирует ЦВМ. Современные управляющие вычислительные машины, как правило, используют двоичный код и оперируют с числами, имеющими 8 или 16 разрядов. Операция квантования дискретной величины g(jt0) по уровню описывается следующим выражением:
 (3.4)
(3.4)
где Int(r) — функция «целая
часть от r»; ![]() — шаг квантования по уровню, т. е. цена младшего
разряда в двоичном коде числа g*(jt0 )
— шаг квантования по уровню, т. е. цена младшего
разряда в двоичном коде числа g*(jt0 )
Величина ![]() определяется из условия:
определяется из условия:
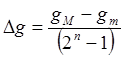 (3.5)
(3.5)
где п — число разрядов в двоичном коде числа; gMи gm- — наибольшее и наименьшее возможные значения величины gсоответственно.
Число g*(jto), полученное в результате выполнения всех преобразований измеряемой величины в ИИК, вводится в одну из ячеек запоминающего устройства УВМ и в дальнейшем представляет в машине значение измеряемой величины x(t) в момент времени t = jt0.
Из изложенного вытекают следующие основные задачи первичной обработки информации в АСУТП:
1) фильтрация сигнала измерительной информации от случайной помехи (погрешности) e(t);
2) восстановление значения измеряемой величины x(t) по сигналу измерительной информации y(t);
3) коррекция восстановленных значений измеряемой величины с учетом отклонения условий измерения от номинальных;
4) восстановление
значений измеряемой величины x(t) при
![]() т. е. интерполяция и экстраполяция.
т. е. интерполяция и экстраполяция.
Кроме того, необходимо оценить влияние квантования сигнала измерительной информации по времени и по уровню на точность его представления, а также рассмотреть методы контроля и повышения достоверности исходной информации в АСУТП.
3.2. ВЫБОР РАЗРЯДНОСТИ ПРЕДСТАВЛЕНИЯ ИНФОРМАЦИИ
В УВМ И ЧАСТОТЫ ОПРОСА ИЗМЕРИТЕЛЬНЫХ ПРЕОБРАЗОВАТЕЛЕН.
ИНТЕРПОЛЯЦИЯ И ЭКСТРАПОЛЯЦИЯ СИГНАЛА
В современных УВМ
наибольшее распространение получил режим обработки данных с фиксированной занятой
[48]. При этом погрешность представления исходной информации, вызванная квантованием по
уровню, не превышает по абсолютной величине единицы младшего разряда, определяемой
соотношением (3.5). Если задана допустимая относительная погрешность квантования по уровню ![]() то необходимое число разрядов определяется
из условия
то необходимое число разрядов определяется
из условия
Обычно n>8, так что относительная погрешность квантования по уровню не превышает 0,4%, т. е. является пренебрежимо малой по сравнению с погрешностью измерительного преобразователя.
При разработке АСУТП важен выбор периода t0 квантования по времени сигналов измерительной информации. Эта задача решается с учетом двух противоречивых соображений. С одной стороны, увеличение периода t0 снижает загрузку УВМ операциями сбора и первичной обработки исходной информации. В результате большая доля вычислительных ресурсов системы может быть использовала на решение задач контроля и управления более высокого уровня. Это соображение особенно важно для микропроцессорных АСУТП. С другой стороны, при увеличении периода t0 возрастает погрешность определения действительного значения измеряемой величины y.(t) по решетчатой функции g*(jt0). Эта погрешность проявляется при восстановле-
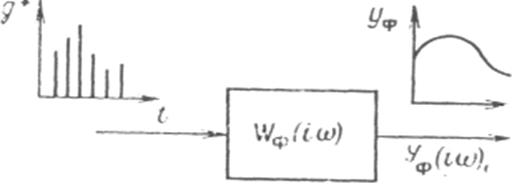
|
Рис. 3.2. Схема восстановления непрерывной функции yф(t) по решетчатой: функции g*(jt0) |
|
|
|
|
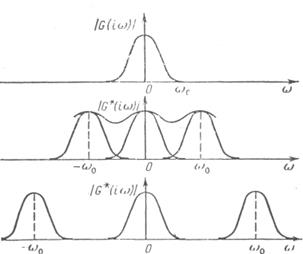
Рис. 3.3. Спектры функций:
а —непрерывной; б, в — решетчатой
при ![]() и при
и при![]()
нии значений функции y(t) в моменты времени, не совпадающие с моментами отсчета tj = jt0.
Задачи восстановления непрерывной функции по ее дискретным значениям делятся на задачи экстраполяции и интерполяции. Экстраполяцией называют определение будущих
значений функции с момента очередного отсчета до момента поступления следующего отсчета. Интерполяцией называют определение промежуточных значений функции между двумя полученными отсчетами.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.